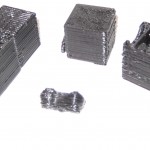
To the right is a first draft print of my latest designs for the sonic screwdriver. It’s next to a USB cable for scale and perspective. There are several things I need to fix:
- It’s too small. I was guesstimating the scale based upon the size of hand holding the sonic screwdriver in one of the photos I saw.
- Too much warpage. I need to build my heated build platform. :) I’ve got my SMT1 soldering Toolkit, now I just need a hotplate.
- Better connectors. The connectors I designed are adequate, but not that great. They need to be much larger to ensure a proper grip between parts.
- Fix a connector. I have a hex connector on one piece and a 16-sided connector on another. That’s not going to work.
- Consider changing the fit. Some parts have a 0.25mm clearance on all sides between the male and female connections. Other parts have a 0.5mm clearance instead. I tried both on different sections so I could test the fit. The 0.25mm clearance on all sides is fine for some parts, but other parts could use a little more wiggle room.
- Change the thickness. My earlier draft was a whopping 0.5mm thick all around. I printed these parts at varying thickness to test their durability, flexibility, conserve plastic, and maximize internal space for future electronics. A 1mm thickness seems to be the most optimal mix.
I’ve posted my sonic screwdriver designs to Thingiverse for people to tinker with and, hopefully, improve. I would sincerely appreciate any help anyone can provide when it comes to designing the upper half of the sonic screwdriver – especially the moving parts.
- surface mount technology [↩]