I’ve been working on a few different mechanical projects for a while now. On the one hand, I’m severely limited by my complete and utter lack of mechanical engineering knowledge. On the other hand, I’ve got a 3D printer so I can always arrive at a decent approximation through enough trial and error.
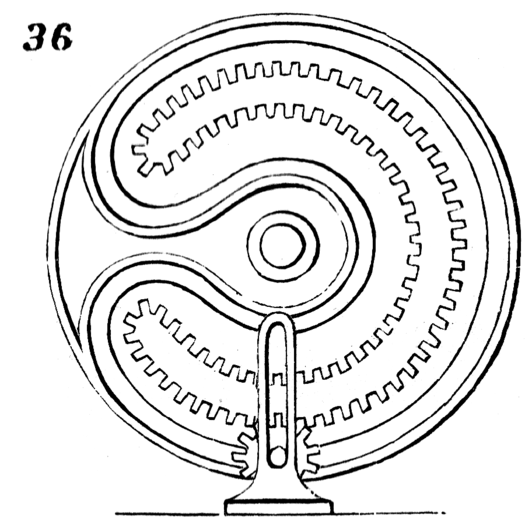
Of course, it’s not like it would kill me to actually learn something about the basics of mechanical engineering. With a bit of googling, I found a page named, “Kinematic Models for Design” which links to a large number of historical texts relating to mechanical engineering – including works from Charles Babbage and Leonardo da Vinci. I found two to be particularly useful – Mechanisms for Intermittent Motion, by John Bickford, 1972, and Five Hundred and Seven Mechanical Movements, by Henry Brown, 1871.
Last, but not least, I want to mention that a friend of mine, Rob Gisebert, told me about the website 507movements.com which is an online repository of the various movements from Brown’s book. Even more interesting, many of these complex movements are are accompanied by animated versions of the drawings in the book.
Hey! It’s been a while since we’ve talked! ((Photo courtesy of Scott Beale))
Hopefully you’ll excuse the rambling nature of this post. :) A fair bit has changed recently. I started a new day job1 in June, but not after taking off all of May and arranging for this last week off.
May was fun, especially Maker Faire and taking the time to go on little field trips. I got my drawing robot in working order, put together a website dedicated to drawing robots, and drew some really cool things. I’ve even got some stories from Maker Faire to share with you.
A Little Story
I had a number of drawings on display in my Maker Faire booth. I had some Doctor Who related things, a Yoda, a Death Star, a Tesla, a House Stark dire wolf, and a number of other things. In particular, one was a big blue TARDIS I had taped to the chain link “wall” and I was working on drawing a dalek.
Then this guy walks up with some friends, asked me a few questions, and then asked me how much for the TARDIS and dalek. I told him that I wasn’t really selling them and that the dalek was only about 75% done – and it would need another hour or two to finish.
He turns to his friend and says, “Hey, how much do you have on you? $110?” Then, he says to me, “I’ll give you $110 for both right now.” I told him he had a deal – but that the dalek was still an hour or two from being done. He said he liked it just the way it was. What the hell, who am I to stand between a man and his Doctor Who-themed robot drawings? I stopped the robot, pulled down the drawings, rolled them up, and took the man’s money.
Another Little Story
At Maker Faire I drew two pictures for other Makers. One was for the guys from Wikipedia who asked me if I could draw a big poster of the Wikipedia logo. They e-mailed me an SVG of their logo and I was happy to draw it up. Although I was still figuring out how best to draw non-TSP SVG files, it turned out really well.
The next drawing was for a fellow maker and good friend, Chris Connors, who needed a banner/poster for his booth for How2Today. He sketched out a few tiny logos in Sharpie on a piece of paper, I took a picture with my cell phone, and I drew a big giant version of his logo. I’m working on putting together a tutorial to help you do this too. :)
Crane Project
I’m about 26% done folding 1,000 cranes. I kinda stalled out on this project over the last few weeks. However, now that I’m back from a vacation I’m hoping to revisit this project and get it back on track.
Okay, that’s it for a catch up post. More soon!
I say “day job” to differentiate what I do as my vocation versus what I do with the rest of my time [↩]
I generally share my 3D designs freely on Thingiverse. Some designs I don’t care much about, I share them in case someone else might fight them interesting or useful. Some I don’t have much of a right to – a very slight variation / derivative of someone else’s work or a derivative of a work that walks the fine line that is “fair use” such as my OpenSCAD Voltron. Some of my designs are things which I think I might be able to turn into something I could sell or be the start of a little business.
And some of my designs I want to share and am particularly proud of – such as my sushi set, pirate ship, and the printed parts for my PlotterBot. For these very few designs, I choose a “non-commercial” license. I’m so proud of these designs that I want to share them, and yet I feel that my creativity and hard work merits reward – especially if someone makes a profit off of them.
I’ve been working on and blogging about my PlotterBot, through several incarnations, for a little over a year now.1 The posts on this site have always tended to be a mixture of near-incoherent ramblings, frivolity, and the occasional nuggets of information. However, since showing off my PlotterBot at the Maker Faire Bay Area 2013 it really feels like that project deserves a website of its own.
While I’ll still discuss my PlotterBot and related experiments here, my goal is to make PlotterBot.com a resource for people who are interested in building an awesome drawing robot of their very own. If you’ve enjoyed reading about my DrawBot adventures here, I hope you’ll sign up for my Plotterbot.com newsletter and stay tuned for some tutorials on how to build and get the most from your own drawing robot.
Did you miss my booth at Maker Faire this year? No problem! Sign up for my PlotterBot newsletter and I’ll send you the entire PDF all of my booth materials and the binder I had on display.
One of only two photos on Flickr that came up with the search term “Spacexula”
My friend Spacexula just sent in this AWESOME suggestion on how to display 1000 origami cranes in a durable pleasing way.12 I’m going to give you a link to his website and blog, but before you click, know that the top post on his site today is very NSFW.3 Spacexula suggests:
I freaking LOVE this idea. The only thing I would need to test first is whether the resin would stick to the cardboard form creating a cloudy cardboard layer on the outside of the resin tower. That said, I love love love this idea and feel quite committed to it already.
Default Series Title
I should mention, this is not the first time I’ve blogged with the title, “Spacexula to the rescue!“ [↩]
I’ve been folding some cranes.1 Well, a lot of origami cranes. I’m shooting for 1000 in 365 days. I’m folding more than 10 cranes a day and at this rate I’ll finish in a little over 81 days. Here are some random tidbits about these cranes:
Project Considerations. My three big concerns for folding this many cranes were the ultimate volume of 1000 cranes, the price for all the paper plus ultimate vessel, and perhaps most importantly the time to fold. The ultimate volume of cranes would dictate the ultimate size of the end project. If too big, where would I put it? Paper, even decent origami paper, is relatively cheap and even $50 to $150 for a nice glass enclosure isn’t outrageous when you consider the amount of time I’m going to be devoting to this project (about 60 hours). Of all of these considerations, time is probably the most constraining factor.
Paper size. When I placed the order for origami paper, I was thinking that I would ideally be folding the cranes out of 1.5″ paper so that the end pile of cranes wouldn’t be too large. I wasn’t really paying attention to the size of the paper I bought – I just bought the cheapest set of 1000 sheets of origami paper, which was actually two sets of 500 each. It turned out the set I bought was 3″ square paper and when I saw it I thought it would be “too big.” I tore the very first sheet into four squares and folded those into really tiny cranes – which took a relatively long time to fold since the steps became more intricate. As it turns out the 3″ square paper is probably completely ideal for my purposes. It’s small enough that the end project won’t take up an entire room and that it’s easy to carry individual squares. It is also large enough that the paper size doesn’t make crane folding more difficult.
Time to fold just one crane. Folding at a leisurely comfortable pace, but not doing anything other than folding, I can fold a single crane in 3:29. Folding as quickly as I absolutely can, I can fold one crane in 1:44. That was my best time after four timed trials. I’m working on developing some guidelines on how best to go about folding 1000 cranes. There are a few minor tweaks to traditional folding techniques that actually help shave a little bit of time, on average, from folding a lot of cranes.
Displaying 1000 cranes. I’ve seen pictures of them strung on a piece of string, or several pieces of string, and affixed to a wall, a frame, or the ceiling. I’ve also seen them glued to a large flat surface. The problem with these methods is that, while cool, the pieces would eventually become a dust trap and start to look shabby.2 Thus, I think I would want to do something different:
In a box. A lot of cranes in a clear plastic box could be interesting and keep dust and little fingers or paws out.
In a big vase. As long as a top was fashioned for a really tall clear glass vase, it could work pretty well.
A cube/sphere/other shape. One idea I had3 is to throw all the cranes into a watertight container, add a water/glue mixture, and compress it into a small heavy cube/sphere/other interesting shape. The constraints from the legend behind folding these cranes is merely that the folder must retain them rather than give them away. While I’m not necessarily interested in trying to play a loophole in the legend, I don’t really see how committing the cranes to a permanent4 form could be frowned upon.
The ones I’m folding are just a bit more simplistic/traditional
I recently mentioned one of my New Year’s Ambitions is fold 1000 origami paper cranes.1 As an ancient Japanese legend goes, a person who folds a thousand origami cranes will be granted a single wish. There are some variations on this legend. It’s possible that you “only” get eternal good luck rather than a wish. There may also be a requirement for all the cranes to be folded by just one person, folded within a single year, the wish may only be made by the person who folded the cranes, and/or the person who folded the cranes must keep the cranes.
Whether the result is a wish, “merely” eternal good luck, or just a really impressive project this is something I want to do. I’ve given a lot of thought to how I want to display them too – but that’s probably best left to another post entirely.
A little while ago I ordered two sets of 500 sheets of 3″ square origami paper. They arrived on 4/17/2013 and I debated about when to start folding them. I know the next two months is going to be super busy – and I would rather start later and be able to devote time to the project than start now and potentially doom myself to interruptions and possible faltering in my resolve. Over dinner on 4/18/2013 I mentioned this dilemma to my wife. She pointed out that there will always be interruptions, I might as well start now, and that she knew I could do it.2 Thus, I started folding cranes that evening.
I’m debating about how exactly to share my crane folding progress here on the blog. Part of me wants to write a WordPress plugin that integrates a Google Docs spreadsheet with Google Graphs to show the latest progress here on the blog. While I still like this idea and will probably come back to it later – that’s a lot of work to show off progress when I could spend that time actually folding some little birds.
This last week at work has been really really really busy, so there were two days when I folded no cranes at all. Most other days I folded between 20 and 25 and a day like yesterday I folded only 9. At an average of 10 cranes a day (which is very doable) 1000 cranes would only take 100 days or a little more than three months.
As of last night, I had folded 111 cranes in 9 days.
I’m a big believer that small changes over time can have a huge impact.1 This year I made some commitments to bring about changes in my life. These aren’t resolutions – I’ve had and broken resolutions before. These were ambitions. The most drastic changes to my lifestyle has been my work on losing weight and exercising more.
I can eat whatever I want and as much as I want, just so long as I am willing to log it into my Fitday account.2
I try to stay under 2000 calories per day, but I don’t beat myself up if I go completely off the rails.3 Every single day when I wake up is a brand new day. This is a two edged sword. It doesn’t matter how “bad” I was the day before, I get a clean slate. Then again, even if I was “good” the day before, I don’t get to give myself any extra leeway.
I try to incorporate a little extra exercise into my routine. Instead of using the bathroom one door down the hall at work, I walk up a flight of stairs and use that bathroom. Instead of driving to lunch or walking to one of the places near my work, I walk 0.3 miles to the second nearest grocery store and get my lunch there.
I only drink coffee, water, and very occasionally alcohol. This actually isn’t any different from my usual routine, but I figured I’d mention it. I’m not big on drinking juice or soda.
I avoid potatoes and rice when possible. I eat bread and pasta sparingly. I try to eat more leafy greens and veggies – usually spinach. I eat tend to eat more yogurt, hard-boiled eggs, and cheese than I used to. (More of an explanation for these changes below).
Why these changes.
At the beginning of the year I found that some of my clothes were a little tight. I decided that every day I could get a little bit heavier or a little bit leaner. That day I decided I would get leaner.
Some of these changes are because of a news bit I heard on NPR a while back. The study, discussed on the Harvard site here, was published in June of 2011. If you get a chance, I highly recommend listening to the NPR clip, scanning the Harvard article, and then glancing through the index to the study where the findings are included. The study basically found that after controlling for many factors, certain foods could be associated with yearly weight increases or losses. Nuts, vegetables, fruits, and yogurt were all associated with net yearly losses and potatoes, red meat, and processed meats were associated with net gains. Surprisingly, cheese didn’t seem to affect the net gain/loss.
What I’ve noticed.
After being on this “diet” for a few months, I’ve fallen into a little bit of a routine. I tend to consume about 150-300 calories at breakfast, 300-700 calories at lunch, and the remainder of my 2000 calories at dinner. At first staying below 2000 was very tough and now it’s pretty effortless.
I’ve found that as a result of this “diet” I’ve mostly lost my sweet tooth and I don’t seem to crave salty/fatty/fried/starchy foods nearly as much.
I probably lost a pound in the first week – which was good because I could “see” a change caused by my minor lifestyle tweaks. At the end of two weeks I had probably lost about two pounds, and while my clothes were still snug – they were less so. When I lost five pounds my clothes actually fit and felt better. When I lost ten pounds I found I was sleeping better. When I lost fifteen pounds people I hadn’t seen since the end of 2012 noticed and commented on my weight loss. Now that I’ve lost twenty pounds I can fit into clothes I haven’t worn in about two years, I sleep better, and I feel like I have more energy.
Looking forward.
They say success begets success. Having lost a few pounds, I felt encouraged to lose five. Having lost five, I felt ten was a reasonable goal. Then fifteen, then twenty. When I was twenty pounds heavier, the differential between what I used to eat and my 2000 daily caloric intake goal was enough to account for fairly easy weight loss that was also reasonably forgiving. If I had an “off” day, I still had a pretty big caloric deficient which meant I was going to lose weight.
Now that my caloric intake and weight have reached something of an equilibrium, something has to change. My weight loss has leveled out at twenty pounds. With the differential between my caloric needs at this weight and my caloric intake pretty close, a single “off” day is enough to erase any caloric deficits I might have accumulated over a week’s time.
Either I need to reduce my caloric intake a little below 2000 (which is possibly a little on the high side for my height/frame), get more exercise, or realistically combine the two.
I’ve installed a chin up/pull up bar in a doorway in my house. A very very very long time ago I used to do pull ups several times a day. When I installed the bar last week I could do two in a row if I struggled. Yesterday I did five in a row.
At the beginning of the year I decided upon a few New Year’s Ambitions.1 I don’t like the idea of resolutions.2 Resolutions tend to be rule-driven. And, the problem with a rule-driven resolution is that once it’s broken, your whole plan is shot. An ambition, on the other hand, is a goal without a prescribed methodology for obtaining the goal.
Thus, New Year’s Ambitions. Here is my list of things that, if I were looking back upon all of 2013, I would like to see as a list of accomplishments.