There really is something special about having built this robot for myself. I know it pretty well how it works and why certain design and engineering decisions were made.
I’ve also modified and customized this robot as I’ve used it. I’ve moved the extruder board, rotated the motherboard to give me better access to the SD card, drilled a few holes in the sides, yanked out the opto-endstops, extended the wires running to the extruder motor, thermistor, and nichrome. I’ve even designed a few minor printable upgrades.
When my extruder stopped working (twice) I just took it apart. I know I’m not going to break it as I do so. And, hell, if I do break it I’ll just fix it.
It’s always a whirlwind heading into Maker Faire. This year is no exception. This past weekend we got things mostly ready for the Rocklin Maker Faire. All of our robots were functional, which was really great. A quick update to document progress and also act like a to-do list of sorts:
It’s been programmed to “blink” the two LED eyes randomly plus a small number of light shows for the body
Designed/3D printed several eyes, settling on a nice design that should make the eye animations look good
Kim’dael LightningSlayer’s Pendant
The youngest’s project has morphed from an LED arm to a CircuitPlayground in a pendant that just plays some notes when she presses buttons.
A long extension for the battery pack, using thicker gauge wire wound through the back of stock CircuitPlayground enclosure, is now the “necklace” portion for this project.
Dexter Starfighter’s ED-E
Has a brand new case, a new NeoPixel ring, mount, LED goggles, and a sweet new set of EVA foam armor.
MakerBlock
My robot wasn’t quite ready for Maker Faire last year, but “ready enough” to share. Last year the little bot was just sitting in a jar I carried around and not really visible to anyone.
This year I’ve added feet (entirely cosmetic), changed the battery pack around so it is removeable, swapped out dome diffusers, and am working on new animations/behaviors.
I realized that my old LED goggles were… janky. This was because I had soldered some buttons to one side and then wired them into the Trinket directly, without any resistors. While it /worked/, it caused some problems whenever I pressed a button. I pulled the Trinket out and swapped in my new favorite board, the QtPy.
I really prefer programming / updating via CircuitPython over Arduino since there’s no pre-compile time and fussy Arduino connections.
Besides the programming/uploading, I love the built in RGB, up to 6 capacitive touch sensor, and easy serial communication
As an added plus, I soldered on the 2MB flash chip so the project as a ton of space. 1
And at almost the same price as a Triket ($0.50 more than the original, $0.50 less than the M0 Trinkets), it’s just easier to swap them into any project I would have previously put a Trinket into
Soldering
I’ve really upgraded my soldering experience and it’s made a world of difference. We moved about a year ago and there’s a space in the house where I can keep a soldering station out and ready to use. Just having it available is such an upgrade. I’ve had several handheld / pen style soldering irons over the years and they’re usually pretty terrible. In fairness, this is also because I’m kinda terrible at soldering. I had a basic garbage soldering iron from the local hardware store, upgrade one that had a little temperature control from Adafruit, and then upon the recommendation of a friend upgraded a few weeks ago to an X-TRONIC soldering station.
I gave my old soldering iron to my neighbor so he could work on a project for his wife. As I got to finishing up work on the above projects I realized I couldn’t find my pen soldering iron from Adafruit – and that I didn’t want to find it anyhow. It was fine. It worked. But, my soldering iron holder was cheap and flimsy and easy to tip over and the helping hands I had from Adafruit were “okay” for very small projects, but the joints came loose easily and the helping hands kept falling off. Rather than spend $20 on another soldering iron I would hate, I dropped $70 on the X-TRONIC station which has built in helping hands and soldering iron holder. Setting aside that it heats up very quickly, has good temperature control, melts solder quickly, and has great helping hands… it has a way to hold the soldering iron in a way that isn’t constantly anxiety inducing. 2
Having the soldering station handy has meant I don’t really mind whipping out a quick battery pack extension cable for our projects. I just need to strip some wires, fire it up, drop some solder, and turn it off again.
I may have ruined the first soldering iron tip kinda quickly. Again, I have no idea what I’m doing. I would add solder, dip the tip in flux, wipe on sponge, and then do it all again. This is a terrible process since all it does it add extra contaminants and gunk to the tip, reducing the ability of it to transfer heat effectively. Instead, after watching a video, I learned I should run it at the lowest temperature appropriate for the solder/joint, just dab the tip in the brass wool to clean it up a little, then maybe wipe on the slightly damp sponge, and absolutely coat the tip in solder before putting it down.
Things left to do!
Things to finish
I’d really like to finish up the Fallout themed shirt/vest to go with my project
A way to attach my wife’s octopus to a purse strap
A better way to wear my robot on my shoulder – may use a similar foam paldron
A big chunky seat belt looking thing for the strap wearing my robot
I’ve got designs for a new bag to wear/carry around Maker Faire, but haven’t sewn them up yet – maybe this week!?!!?
Make sure we have
Enough batteries, battery packs, etc for our projects
USB chargers for our LiPo batteries in goggles
Finish my goggles (install battery, update code, possibly change out diffusers
It’s one thing to hack away in CAD software, rendering the idea of a model. It’s another thing entirely to pull it off the print bed and pop it all together.
This slideshow requires JavaScript.
Last night before going to sleep I started the 2+ hour print job that became the center body piece for the CuttleBot. When I woke up in the middle of the night, I plucked it off the build platform, started the tail section printing (a 90 minute print job), and passed out again. This morning I printed 15 connector pins while getting ready for work.
Just before leaving for work, I yanked out the support structures using some needle nose pliers and popped it all together with the connector pins, and took some pictures to share with you, dear reader.
This was an incredibly satisfying result. Sometimes the work spent on something like the little pins and sockets feels so removed from the design of the main object – so very far from the goals. It feels similar to the work that goes into painting a house – you spend all this time NOT painting before you actually paint. Moving and covering furniture and decorations, taping and masking areas off, removing cabinets and doors. But, as long as I was able to keep my eye on the vision of the final model, laying that ground work on these components meant that I really could assemble a foot long plastic CuttleBot body in a few seconds.
Sigh. At this point, it kinda resembles a CyberMat more than a robotic cuttle fish.
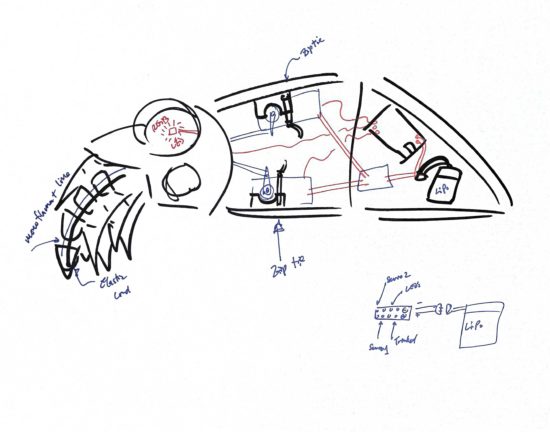
I enjoy sketching out my ideas, so here’s one in case you like looking at them.
It’s NOT a CyberMat! It’s a robotic cuttlefish!
So, what’s left to do? A whole lot. I need to:
Design newer, thinner tentacles, so I can fit more into the CuttleBot’s head.
Hollow out the robot’s head or at least create channels for wiring for LED’s inside the eyes.
There needs to be some mounting areas inside the robot to secure one or two micro servo motors, a small circuit board, a battery, and possibly a few additional components.
Possibly create a door allow easy access to the interior of the robot. Once I start adding electronics, it might be great to have an on/off switch and nice to be able to connect a USB cable to it to recharge an internal battery or reprogram the behavior.
Add the electronics and program them.
This is probably two servos, several chained NeoPixel LED’s, a LiPo battery, an Adafruit Trinket, and possibly a LiPo charger (if I have one lying around).
If I’m already working towards building a new version anyhow, I might want to drop a few dollars on an OSHPark Board to help make the power from the LiPo easier to route to the servos, LED’s, and board.
However, I don’t think I’m going to be able to finish the robot before Friday.
I think I could probably manage blinking LED eyes by Friday.
I really like 3D printing – but really dislike post-processing. This means I’ll make extra efforts to design things that can just be plucked off the build platform and hand assembled without tools. With my limited build volume, this also means larger objects need to be printed in sections.
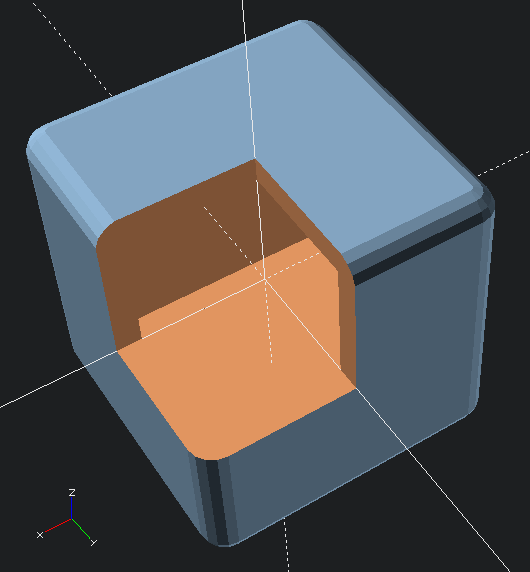
I’m very proud of a particular design method in the CuttleBot. I designed the organic and non-angular design of the CuttleBot body by using the “hull” function and several carefully deformed and positioned spheres. However, it would be very difficult to hollow out the interior – since it would mean designing another entire structure to be subtracted out. Instead of creating the outside shape I wanted and using difference to hollow the interior, I designed the interior shape and used that to create the exterior with the “minkowski” function.
Here’s an OpenSCAD code example:
difference()
{
// Traces sphere around exterior of cube
minkowski()
{
// Main object
cube(50, center=true);
// Object to trace around main object
sphere(r=5);
}
// Removing center of object
cube(50, center=true);
// Arbitrarily large cutout
cube(10000, center=false);
}
Minkowski sample
Although, now that I think about it, there’s probably an even cooler way to do this! Since the above code needs to refer to the “target” object twice, that code can be simplified by using the “children” function. The below code creates an identical shape.
The great thing about a modeling process like this is it allows you to maintain an even thickness all the way around the model. This would be increasingly difficult as the complexity of the underlying model increases.
Lastly, to return to the model, after hollowing out the interior of the CuttleBot, I added areas for the pins to connect the sections together. The body of the robot is in three sections – the head, the mid-body, and the tail sections.
There’s still more to do on the model. Ideally, I’d create a way to open the robot without having to completely take it apart each time. A hinged door would work fine. Also, I should probably add an area where one or more micro servos could be zip-tied or otherwise secured in place. Also, I’ll need to modify the robot’s head later on to allow for multiple (smaller) tentacles and channels for adding wiring for LED’s to the eyes.
There’s also the whole “adding electronics” thing. You know, to make this less a puppet and more a robot.
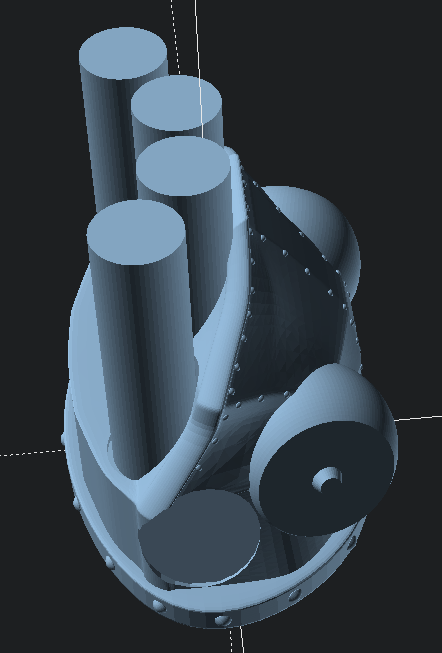
Well, it’s here! Today is the start of #CephalopodWeek on ScienceFriday! There’s a little progress to report on my, tentatively named, CuttleBot. I’ll post a picture first, then get to describing the progress so far.
Assembled CuttleBot head, side view
In the prior post I listed some of my sources of inspiration. Another such source is the work of Sean Charlesworth and his awesome Octopod, Gowanus Monster, and newly published Scuttleship. ((If you like his work, be sure and check out his Etsy shop!))
This slideshow requires JavaScript.
Since I need special connectors for the articulated/articulating tentacles and I wasn’t able to edit the files in OpenSCAD, I wasn’t able to use Sean’s STL files. However, I really like the aesthetic of his designs1 and how they really evoke the form of an octopus or cuttlefish. Here’s a mock up I used to help me visualize what a full-scale Scuttlefish head might look like with the tentacles I designed.
Scuttlefish with placeholders for tentacles
Unfortunately, the Scuttlefish head and body parts are just a tad too large for my small printer’s build volume. However, even if I were using a larger printer, I would still not want such a large robot as I’m hoping for this to be a shoulder-mounted companion.
Thus, I began work creating an OpenSCAD cephalopod cuttlefish head inspired by Sean’s work.
This slideshow requires JavaScript.
Now that I had a design, I set the printer to work over night. This design is mostly to see if the various parts for the tentacles would work with this head. Since I want to put some LED’s in the eyes and possibly the mouth, I’ll need to hollow it out later.
The print took a little over an hour for the head.
This slideshow requires JavaScript.
How about a video of it working?
I’m very happy with the progress so far. If I can shrink down the tentacle mechanisms, I can add more tentacles for more interesting emoting and animations. The video just shows the results of me yanking the fishing line running through the CuttleBot’s head.
Here’s a few more sketches of how I am planning on putting it all together.
This slideshow requires JavaScript.
I might add some fabric frills / fins, instead of printed ones. I was also contemplating letting the top “shell” of the CuttleBot be formed from 3D printed spines with a fabric or thin plastic sheeting covering. This might help reduce weight or allow for internal lights to shine through the body.
Still high off Maker Faire 20191 , I was also excited by the prospect of #CephalopodWeek on NPR’s ScienceFriday. Between cuttlefish, squid, and various octopuses (especially the “Opisthoteuthis Adorabilis“), there are a LOT of awesome little friends to consider making.
While trying to avoid work, I posted a sketches to Twitter.
This slideshow requires JavaScript.
Last week I started designing a few parts, drawing from some experience designing printable prosthetics for the E-nable project a few years ago. I was trying to build it out of what I had on hand, which did not include elastic cord. I thought a zip tie might provide enough “spring” and “give” to work.
This slideshow requires JavaScript.
I admit, this was a total mess. I suppose it is only fitting I use this meme featuring Dr. Zoidberg.
Thanks Dr. Z
Thanks to some kind encouragement from Odd_Jayy, I kept moving forward. Rather than focusing on the end of the tentacle, I got to work on the basics of the mechanics – channels for the elastic cord and fishing line, wedges cut into the faces so the tentacle could articulate.
This slideshow requires JavaScript.
The tabs on these parts were too thin and tended to break when I assembled them. However, the next version worked really well.
This slideshow requires JavaScript.
These worked a lot better, so I started cranking out parts.
The nice thing about these tentacles is that they look somewhat lifelike without actually requiring much in the way of electronics. As long as I can design a body/housing and put a servo inside, that one servo could possibly pull on 8 different sets of fishing line to articulate all the tentacles at the same time. And, since it’s just fishing line, there’s no special routing of brake cables necessary.
The tentacles are somewhat larger than I would like, so that means where they connect to the body needs to be similarly large. There’s definitely room for improving the tentacle segments. I’ve already designed two different “ends” for the tentacles, so they’re rounded instead of exposed connectors, fishing line, and elastic cord. Also, to make the curling tentacle look better, I should angle the the top and bottom of each segment. Another improvement would be to rotate the articulation angle for different segments to give the tentacle a more organic look when moving.
However, if I don’t get working on the body of the robot, it’s not going to ever get done. Given the size of the tentacles, I’d need to have them all on one side, lest the little robot take over my entire shoulder. Here are some “Cuttle-Bot” sketches along with a robot body design. If you look at the design, you’ll notice the connectors are rotated to different angles. This is so that the tentacles would each spring back together towards each other – and then splay outwards when articulated.
This slideshow requires JavaScript.
However, this last design takes FOREVER2 to render in OpenSCAD. This is at least partially due to design and code inefficiencies, but also due to the number of spherical parts, facets, and “hull” operations needed to make these parts work.
I think I may want to try shrinking the tentacles slightly so I can build a smaller-bodied robot. Either way, I have to get cracking on at least some kind of housing/body and mounting motors/electronics before I can keep moving forward.
I was waiting to surprise you with this, but last week I bought a MakerBot and had it shipped to work. 1
Well, it arrived today… and really… I suppose this is my own fault… but… you see… I was just robbed.
One of the best and most irreplaceable things about getting an awesome new robot is unboxing it. The mailroom guys at work, well intentioned though they are, opened my MakerBot box. I suppose I could have told them in advance that the robot should be arriving soon and to be on the look out for it.
Nevertheless! Tonight I have to clear a space in my Robot Work Area so that I can add my Replicator to the line of robot workers. But what to name it? My MakerBot Cupcake CNC is named “Bender,” the MakerBot Thing-O-Matic is named “Flexo.” There are so many Futurama robots to choose from.
So, let’s say I was a tinkerer1 and you told me that you could show me a robot that could make things out of plastic that I would normally have to cobble together out of junk. I would say that is awesome.
During the most recent Ask An Engineer Woz was2 talking about her knitting machine. LIGHT BULB.
Honey! Honey! Guess what?! Did you know there are such things as KNITTING MACHINES!?! I mean, ROBOTS that would do all that tedious knitting FOR you! We could just program it and it would just make stuff for us! Isn’t this awesome?! <Wait for squeals of glee>
.
..
…
Apparently there’s something about the act of knitting that is considered productive. I don’t know. I’m not convinced.
Isn’t humankind just all leading up to the point that we’re all like the Jetsons and I have a robot at work that pushes the single button for me.3 And jetpacks. Can’t forget the jetpacks.
Where was I?
Oh, knitting robots. Okay, here’s the thing – I may not be interested in knitting, but a knitting robot interests me. 45 I am not interested in knitting something myself any more than I am interested in actually building something layer by layer with a hot glue gun that shoots molten ABS. 6 But, I am interested in having plastic stuff just as I’m interested in having clothing.
Heck, if I had a super big and super fast knitting robot, I’d probably try to weave paper or cardboard into clothing and then wear it and then try to recycle it into something else. 7891011
Also, this is what I believe a knitting robot would look like:
Reminds me of an old joke about a man and a dog and a data center. Supposedly you only need one of each to run a data center. The man to feed the dog and the dog to make sure the man doesn’t touch any buttons. [↩]
I just uploaded my latest designs to Thingiverse. I’m working on a RoboSpider using a set of gears run in an elliptical cycle. I’ve been through a few revisions already and just came up with a new idea on how to design it with a thinner profile and hopefully work more reliably.
Unfortunately, the snap-together system I had designed just wasn’t working very well. Also, my very VERY DIY gears are a poor substitute for using a legit gear script. They don’t mesh that well and it shows. I think I’ll give Cbiffle’s spur gear script filter for Greg Frost’s gear script a shot.
In the meantime, is anyone interested in designing a little rubber band powered motor to drive this thing?
Okay, you had a robo-blog. That’s fine. Nothing wrong with that. In fact, I’m appreciative for some of those posts and blogs you pointed out to me. You apologized profusely, though I don’t there’s a need to apologize for a robo-blog per se.
However, since then your robo-blogs have gotten worse. The one associated with 3D-Printer-Parts.com, which links back to your site, is collecting anything and everything with the words “made, make, printer, 3d, 3-d” et cetera. Oh, but that’s not the worst part.
Make up your mind – do you want to be a blog aggregator or sell robot parts? There are tons of aggregators out there. Not many are very good. The ones that are have a real person picking and choosing. The robo-blogs are basically packed with irrelevant or useless content. Turn off the robo-blog and drop the fake secondary sites. Rather than stealing the content of potential customers, why not write some of your own content. How about posting some information about your own products? Or some innovations of your own? Stolen content doesn’t help you with customers, hurts your Google PageRank, and actually causes ill will.
Why not take a page from MakerBot and MakerGear? Have a contest, give some stuff away, write some interesting things, ask them for help, show them you care, involve your customers, and form a community.