
Last night I connected my newly designed pen holder to my finished drawing robot and attempted a relatively “quick” drawing of Yoda. I say “quick,” because it only took about two hours. The one lone trade-off for having an cheap and easy to build robot capable of essentially unlimited drawing sizes is that it can take a long time. I took several photographs of my robot while it was drawing and turned them into an animated GIF, featured at the end.
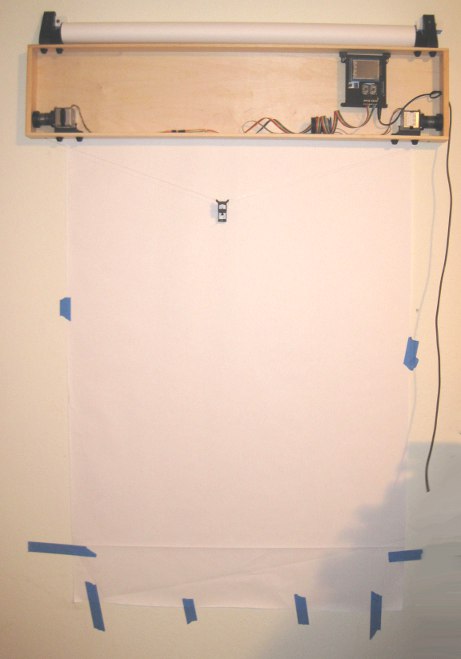
Above is the robot itself, mounted to the wall. I’ve made two minor changes to this setup since that photo, detailed just below. First, I’ve placed a large sheet of sacrificial cardboard under the paper so that any pen leaks will not mar the wall. Second, since the “home point” (exactly 130mm down from the exact midpoint between the two spots where the cord leaves the project box) is hidden by the paper when I pull it down, I needed a way to be able to center the robot without having to re-measure the home point each time. My solution was to take a small piece of leftover plastic about the size of a pinhead and tape it to the home point on the cardboard. Now, I can feel the home point through the sheet of paper and center the pen holder accordingly.
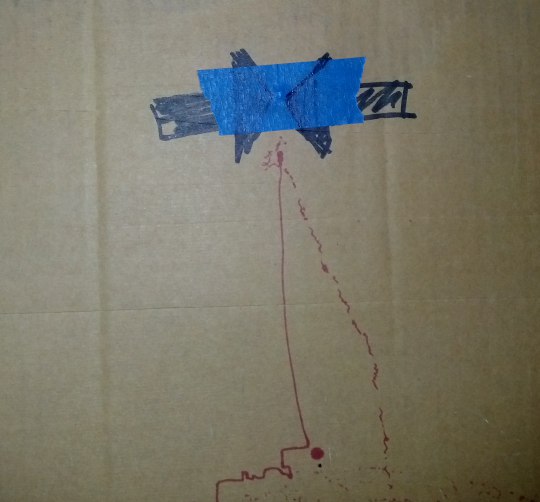
It’s a little difficult to make out in the photo above, but you can see the two big arrows pointing to the home point and a slight bulge in the tape caused by the small plastic speck.
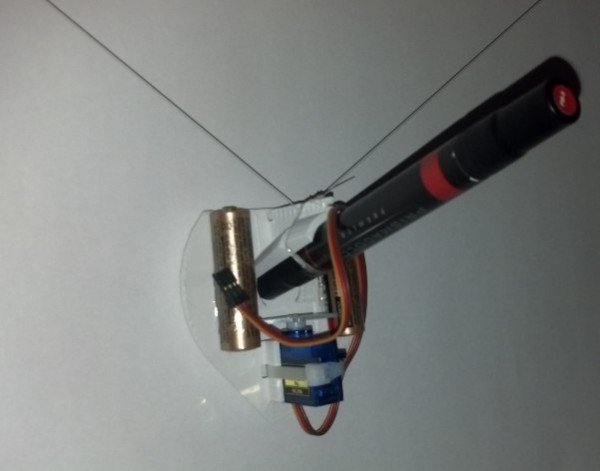
This picture shows the pen holder fully assembled. I operated it the first time without the benefit of a servo motor cable. I wanted to see if the pen holder would work well. Once the drawing was about 2/3 done and I was pretty happy with the pen holder’s operation, I soldered up a cable to connect the servo lift port to the servo motor.
The above animated GIF is comprised of eight separate photos from my digital camera on a tripod, combined in GIMP. I’ve never to make an animated GIF from a series of photos, but it very quick and painless. Since video takes up a lot of space and battery power, I figured a series of photos would be the easiest way to create a “time lapse” of the robot’s operation. You don’t get the low drone and hum of the motors, but you can see how it operates. Now that I’ve done one, I’m looking forward to making more of these.
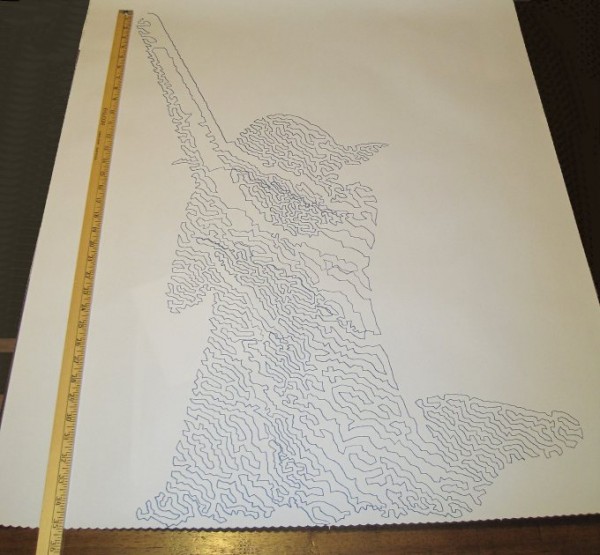
And here is Yoda! As you can see from the ruler next to him, he’s about 35 inches tall from the tip of the lightsaber to his feet. There’s a “band” of the drawing that appears to be shifted downwards slightly, causing a little overlap at the bottom of that region and a slight gap above. This is probably due to me fiddling with the robot, but it could also be due to the motors slipping or skipping slightly during operation. If it was due to me fiddling with the robot, then the fix is simple – I just need to be more patient. If it was due to the motors skipping steps, then turning up the pots just a little would probably fix that. Given that this is the very first drawing from my very first draft of a new pen holder, I’m really happy with the result.












