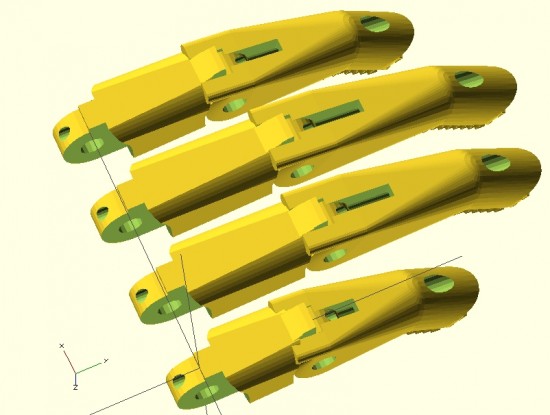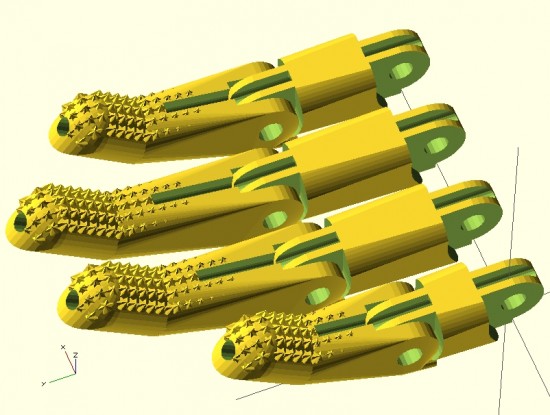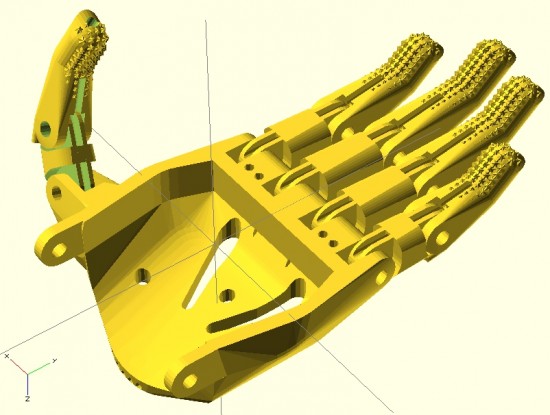
Here you can see the fingers placed appropriately with the palm. I’ve used the same “finger” designs to add a thumb.
For right now, this is just to demonstrate the progress so far. Theoretically, the only thing left to do is crank out an appropriate gauntlet to bring the entire design together. In reality, there’s still a fair amount of work to do. The design for the prosthetic palms was… not elegant. Also, I want to create a separate (but very similar) design for the thumb.1 It is possible that if I improved the finger designs, I might be able to get away without designing a separate thumb.
In the meantime, I think it looks good and would probably be functional as-is.
Onwards and upwards!
Default Series Title- I feel like the thumb should be stubbier, so I’ll go back and adjust the designs accordingly. [↩]