In my last post I tried to list off as many uniquely designed drawing robot pen holders as I could find. The reason for documenting them as I did, and pointing out certain design choices, was to help me identify ideal qualities in a drawing robot pen holder. Before I dive too far down this rabbit hole, I should mention that Stuart Childs has an excellent post on his site discussing the particular challenges faced by those who seek to design a pen holder.
Before we can talk about how what makes a good pen holder, we have to agree on some of the terminology:
- Pen holder. This is just the device that holds the pen and hangs down against the paper for drawing. While it is sometimes called a “gondola,” I’ll refer to it as “pen holder” in this post.
- Cord. Different drawing robots use different methods for controlling the gondola. Some use monofilament fishing line (as is my preference), others use toothed belts, some use beaded cords. For ease of reference, I’m just going to use the word “cord” to refer to whatever method might be used to connect your pen holder to the motor spools/sprockets.
- Hanging triangle. When you draw an imaginary line between the two stepper motors, the cords from each motor meet at a point on the pen holder, forming a triangle pointing downwards.1
- Cord convergence point. The “cord convergence point” is the, sometimes imaginary, point where the two pieces of cord meet to form the tip of the hanging triangle. Many times the cords don’t actually physically meet. In those cases, the “cord convergence point” would be the point where the two cords would meet if both cords were perfectly straight lines that continued through their point of attachment to the pen holder.
- Up / Down / Left / Right. These directions will assume your robot is mounted to a wall/large sheet of plywood and you are facing the wall. ((This could cause a mention of a “pen up” to be confusing, so I’ll try to avoid this phrase))
- Forward / Back. Again, assuming you are facing a wall on which the robot is mounted, forward here would mean going towards the wall and back would mean moving away from the wall.
Without further ado, a list of ideal qualities in a drawing robot pen holder. While not in any particular order, I’m listing them by number for ease of reference later.
- Secure pen holder. The pen holder must, as you might imagine from it’s title, hold the pen used for drawing. If it doesn’t hold the pen securely, you’ll get squiggly lines when you don’t want them and really squiggly lines when you only want somewhat squiggly lines. It is important to note that a pen should be held securely so that it doesn’t move around left/right/up/down or back and forth. Even if a pen is held securely with respect to left/right/up/down, it could still accidentally be pushed back (or, I suppose get pulled forward?) causing the pen to not touch the drawing surface (or always touch the drawing surface) despite pen lifts.
- Adjustable pen holder diameter. An ideal pen holder should be able to hold a big fat marker or a teeny tiny marker.
- Adjustable pen position. I’ve noticed that some pens are a lot narrower near the pen’s tip. Thus, some pens will need the pen tip to be closer or farther from the wall, depending upon it’s own characteristics.
- Adjustable tilt to pen. Although markers can pretty much draw at any angle, other pens (such as ball point or gel ink) just won’t work when they’re nearly horizontal.
- Incorporate a micro servo. Single line drawings are really awesome – but with the addition of a micro servo for pen lifts, the robot becomes infinitely more versatile.
- “Depth” of pen holder. Just to choose a term, this would be the distance the pen holder sticks out from the wall. To strain the metaphor, the “shallower” the pen holder the less it can tilt or tip front/back or up/down. Conversely, the “deeper” the pen holder, the more it could tilt or tip as it moves.
- Distance of center of gravity from wall. This is an interesting one. When I started building my robot, I thought the best thing to do was to have the wires leave the project box as close to the wall as possible – so that they would “encourage” the pen holder to hang closely to the wall. Then I realized that it was actually equally important to achieve a balance of the pen holder. With most of the considerations here, I can pretty much determine whether it is better to choose a configuration one way or the other. Unfortunately, with this issue, I can’t decide whether it is better to have the pen holder’s center of gravity close or far from the wall. Of course, not knowing won’t stop me from pontificating, eh?
- First, let’s agree there’s no apparent benefit to having a pen holder designed so that it is “deep” and balanced such that the center of gravity is farther from the wall.
- Second, the only apparent benefit I can think of to have a “shallow” pen holder is that it might reduce tipping/tilting somewhat.
- Adjustable line attachment points. As the weight of the pen holder changes, so would it’s center of gravity. Thus, the attachment points should also change.
- Adjustable weight. Weight is one of the more finicky variables. If the pen holder is too heavy, the motors will have a harder time, require more power, and be noisier. If the pen holder is too light, there may not be enough pressure against the drawing surface, the cords may not be held taut (and thus will not behave as the program expects them to), it won’t be as responsive to the tugging of the two cords, and will tend to tip up or down or bind against the wall.
- Balanced pen holder. An ideal pen holder should be balanced so that it doesn’t want to tilt left/right, up/down, or forward/back.
- In this video from Darcy Whyte’s site you can see how a pen holder that appears to not be balanced well tends to tilt or tip in response to a change in direction – essentially pivoting around the pen’s tip. When this happens the pen either doesn’t move as much as the program expects causing certain features to be too short or the lines and curves drawn will appear to have a “stuttering” quality caused by the pen not moving with the cord because the pen tip is binding against the wall and then releasing suddenly and going too far.
- I used to think it would be more advantageous to have slightly more weight on the forward side of the pen holder – now I’m not so sure. What I used to think was that by having the front end of the pen holder heavier, it would somehow exert more force on the wall. However, there really isn’t any logical reason this should be the case. Or, until I put a force sensor on the wall and test it, I don’t think I can claim this to be the case. Watching videos of drawing robots and my own drawing robot in action, I now think that a very light touch on the wall might be more ideal. Let’s assume any decent pen, especially markers, aren’t going to require a lot of force to leave a mark. The more force with which the pen is pressed against the wall, the more likely the pen tip is to bind against the wall and draw stuttering lines or lines that are too-short. Meanwhile, a very well balanced pen holder that is lightly pressing against the paper should not bind at all, resulting in more accurate lines.
- Points of contact. There are any number of different designs for pen holders. Some of them only touch the drawing surface with the pen tip (like the Der Kritzler, AS220 Labs and GarabatoBot), while others tend to have three points of contact (such as Makeangelo 1 & 2), and some basically have a large wide flat surface which meets the drawing surface (Polargraph, Mr. Drew, and DRBO). My original mis-use of John Abella’s pen holder design actually had two points of contact – the pen tip and then the sack of batteries that hung from the holder. A few comments about these different styles:
- One point of contact. This single point of contact will always be either the pen tip or device used to create a pen lift. Either way, the resulting pen holder can easily tilt left/right, back/forward, up/down, or any combination no matter how well balanced. If you’re going with a single point of contact design anyhow, I suspect a well balanced and “deep” pen holder might work best. Here, by deep, I mean a pen holder that sticks out from the wall. My suspicion is that dialing in the pen’s balance, you might be able to achieve a favorable angle of pen-to-paper. Having a “deeper” pen holder would allow more room for the robot operator to adjust the cord attachment points.
- Two points of contact. This is just a bad idea – just don’t do it. The way I implemented this involved a weight hanging below the pen tip. When the pen moved too fast, the weight would swing causing a pendulum like wobble in the drawing.
- Three points of contact. This seems, intuitively and by observation of Dan Royer’s videos, to be a stable pen holder design choice. The two extra points of contact (in the case of Dan’s Makelangelo below and to either side of the pen tip) prevent the pen holder from tilting back/forth, left/right, or even up/down. A three point of contact pen holder could still have a sway left/right problem, but that’s so bad if it means you’re eliminating all that tilting.
- Full contact. This setup, like the three point contact, eliminates any form of tipping and is possibly less susceptible to left/right swaying. Unlike the single point of contact setup, I think this kind of pen holder might benefit from being shorter (as in doesn’t stick that far out from the wall)

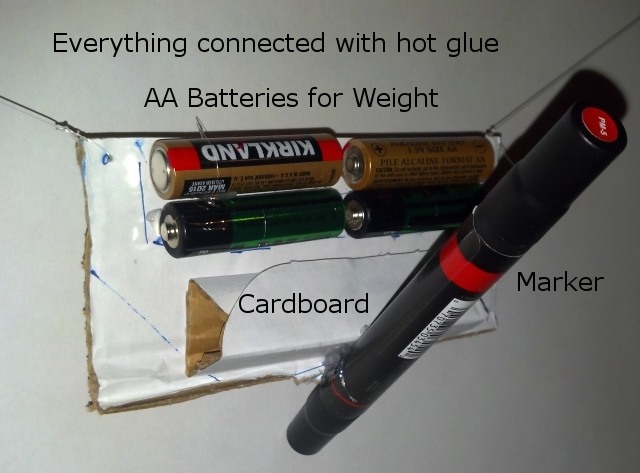
…can be drawn by something as ugly as this
- Cord attachment points. There appear to be about several different ways of approaching cord attachment to the pen holder.
- The cord convergence point is exactly at the pen tip. This kind of setup requires nice big bearings or metal tubes that allow the cord attachment points to rotate around the pen tip. As the angle where the two cords meet changes, the two cord attachment points rotate to accommodate. Getting the cord convergence point to be centered on the pen tip is much more complicated to design and expensive to build. Look to the Polargraph and Ragnar drawing machine for examples of this type of design. This is particular design choice does not introduce any distortion.
- Off-center but close together. This is a very simple and extremely common method of cord attachment. Each cord is connected to the pen holder a little to the left and a little to the right of center with the pen usually a little below that. As long as the two cord convergence points aren’t really far apart, this method will introduce very little distortion. Additionally, by having the two cord attachment points separate, this kind of pen holder enjoys a little extra stability.
- Single cord convergence point, not at the pen tip. I have not been able to find any pen holders that use this method of cord attachment. It would basically involve using a single point of cord attachment, either by simply tying the two cords to the same point or by using two pivoting arms as with the Polargraph or Ragnar drawing machine. Rather than the pen tip being at the same point as the cord convergence, the pen tip would be at some point a constant distance and position from the cord convergence point. I think the reasons this type of holder isn’t seen is that it is so easy to build an “off-center but close together” style pen holder, any distortion with the “close together” method is extremely small, and having the cord attachment points separate provides the added benefit of a little extra stability against tilting. However, as long as stabilizers (three point of contact or full contact) are used, there shouldn’t be any reason not to employ a single cord convergence point.
- Devil-may-care. The big Deathstar at the top of the post was drawn by the ridiculously crude pen holder pictured above. Even with the cord attachment points being 120mm apart, the results are really great.2 Building a pen holder with this design choice will introduce some distortion. It’s unlikely someone is going to be as foolish as I was to build a pen holder with cord attachment points as wide as 120mm. However, even in such an extreme case, the distortion was shockingly small.
- Location of weights. While I haven’t done any tests on this, I’m fairly certain that having the weight of the pen holder as tightly packed around the cord attachment point as possible is most advantageous. The last thing you want is for an off-center weight to cause the pen holder to sway during a direction change.
Enough talk! I think it’s time I start actually designing a pen holder!
Default Series Title- This is a term I only learned today from the context of Sandy’s comment in an earlier post. This term is just so perfect and useful in describing drawing robot set-ups, I just have to include it here. [↩]
- Unfortunately, the Sharpie started to run out of ink about 2/3 through the picture, which does detract from the drawing somewhat. [↩]