The winner of Maker Faire’s contest “The Road to Maker Faire Challenge” gets $2,500.00. Dear gentle reader, should I be fortunate enough to win – I hereby make you these two promises:
I promise to spend every last dime on building more and better robots.
I promise to continue blogging relentlessly about what I did, how I did it, what worked, what didn’t work, and how you do it all yourself too.
Until very recently, I had only considered a drawing robot’s pen holder maintaining the pen at an angle to the drawing surface as an obvious and positive thing.1 I have now been cured of such illusions and understand that when the pen is mounted at something other than perfectly perpendicular to the drawing surface, it is possible for the pen tip skip or stutter across the drawing surface.
I’ve already droned on at length about the various ideal attributes I considered while designing a pen holder. In light of this new important attribute of pen tilt other than perpendicular causing pen skipping, would I modify my design?
It probably depends.
First let’s consider what causes the skipping itself. It seems to occur when the pen holder moves faster than the pen tip “wants” to be dragged across the drawing surface. The result is that the pen tip tilts slightly with an upward movement instead of drawing upward for a short distance, then the pen holder swings a little to compensate for the upward jerk, then the pen tip skips upward – leaving a gap the pen tip skipped over. (I feel like I”m not explaining this well…)
Once I read that post by Dan, I did some half-scientific tests.2 I dragged the pen holder around on the drawing surface. This is not even close to an operational simulation because I’m sure I didn’t keep the pen steady and the pen holder would almost never move that quickly. I found that when the pen was moved very quickly upwards, the entire pen holder would indeed skip. I tried the same “experiment” again after having adjusted the pen so that it was perpendicular to the drawing surface. This time the pen still skipped – just a little less than when it was at a 15 degree tilt in the pen holder. However, the pen I was using was a big marker.
Setting aside the pen tilt for a moment, I can’t think of any other benefits besides skip-reduction behind putting the pen perpendicular to the drawing surface. The next thing to consider is whether all pens skip equally. Not having actually performed a specific test to determine this, and speaking only from experiences in using different pens, I would suggest that not all pens skip equally. Specifically, good ball point gel based pens do not appear to skip when operated very quickly. In fact, running a gel based ball point pen seems to work quite well since it seemed to keep the itty-bitty ball inside the pen tip moving, which keeps the ink flowing.
I would suggest that the desirable pen holder tilt would depend upon (a) pen holder speed and (b) type of pen possibly as follows:
Marker, perpendicular
Ball Point Pen, perpendicular
Marker, tilted
Ball Point Pen, tilted
Fast Pen Holder
I would hypothesize a fast moving marker is going to skip whether it is mounted perpendicularly or not.However, from a semi-scientific test, I a tilted marker would skip a little more. It is important to note that a marker will draw equally well whether it is perpendicular or tilted.
First, gel ball point pen will quickly stop being able to draw ink if it is not held at a tilt. A non-gel ink ball point pen might not have this problem since at least some of the ink comes through via capillary action.Either way, drawing perpendicularly is a problem for ball point pens. However, since their tip makes a small point of contact with the drawing surface, they don’t seem to suffer from skipping problems, even at high speed.
I don’t think a marker held at an angle is going to draw lines any better or worse than one that is held perpendicularly.However, my limited testing suggests that markers drawing at an angle quickly will skip a little more than quick drawing markers held perpendicularly.
I suspect a ball point pen of almost any kind would work well if drawing at an angle. Almost every single drawing made with my first drawing robot was done with ball point pens operating at about a 30-45 degree angle.Admittedly, that robot never drew very quickly, but then again I never seemed to have problems with skipping.
Slow Pen Holder
If a pen holder with a marker is moving too slowly, the result will be ink bleeding all over the drawing and through the paper and pens that dry or run out too quickly. It’s really quite a mess.I suspect that running any marker too fast is going to cause skipping problems – whether it is at an angle or not. A marker’s tip either starts out much wider than a ball point pen, or it will end up that way after hours of drawing and being dragged across a large sheet of paper. In my experience, using a marker in this fashion will basically make the marker unsuitable for any other purpose.
With the caveat that pretty much any kind of ball point pen is going to have a difficult time drawing perpendicular to a vertical drawing surface, I would posit that moving the pen slow-to-medium would result in gaps in the drawings. However, I think those gaps in the drawing would likely be more due to the ball point pen not have sufficient friction to keep ink flowing consistently.
A slow moving marker makes about as much of a mess as an oil spill.Even assuming a medium-speed marker, I don’t think skipping would be that big a problem as long as the pen was not tilted at too severe an angle.
A ball point pen could probably be operated anywhere between slow and fast.As long as the pen is moving relatively continuously, a ball point pen should be able to provide a continuous stream of ink.
Taking into account the potential for skipping, I would suggest based on the analysis above, that skipping is a problem for markers no matter the angle and largely irrelevant for ball point pens. I would also suggest that a very slight pen holder tilt of 15 degrees is extremely helpful, if not crucial, to ball point pens and mostly irrelevant to markers.
Hey Dan, what do you think?
Last but not least, this is post #80 in this DrawBot Adventure Series! And there’s still so much to cover!
Before we can talk about how what makes a good pen holder, we have to agree on some of the terminology:
Pen holder. This is just the device that holds the pen and hangs down against the paper for drawing. While it is sometimes called a “gondola,” I’ll refer to it as “pen holder” in this post.
Cord. Different drawing robots use different methods for controlling the gondola. Some use monofilament fishing line (as is my preference), others use toothed belts, some use beaded cords. For ease of reference, I’m just going to use the word “cord” to refer to whatever method might be used to connect your pen holder to the motor spools/sprockets.
Hanging triangle. When you draw an imaginary line between the two stepper motors, the cords from each motor meet at a point on the pen holder, forming a triangle pointing downwards.1
Cord convergence point. The “cord convergence point” is the, sometimes imaginary, point where the two pieces of cord meet to form the tip of the hanging triangle. Many times the cords don’t actually physically meet. In those cases, the “cord convergence point” would be the point where the two cords would meet if both cords were perfectly straight lines that continued through their point of attachment to the pen holder.
Up / Down / Left / Right. These directions will assume your robot is mounted to a wall/large sheet of plywood and you are facing the wall. ((This could cause a mention of a “pen up” to be confusing, so I’ll try to avoid this phrase))
Forward / Back. Again, assuming you are facing a wall on which the robot is mounted, forward here would mean going towards the wall and back would mean moving away from the wall.
Without further ado, a list of ideal qualities in a drawing robot pen holder. While not in any particular order, I’m listing them by number for ease of reference later.
Secure pen holder. The pen holder must, as you might imagine from it’s title, hold the pen used for drawing. If it doesn’t hold the pen securely, you’ll get squiggly lines when you don’t want them and really squiggly lines when you only want somewhat squiggly lines. It is important to note that a pen should be held securely so that it doesn’t move around left/right/up/down or back and forth. Even if a pen is held securely with respect to left/right/up/down, it could still accidentally be pushed back (or, I suppose get pulled forward?) causing the pen to not touch the drawing surface (or always touch the drawing surface) despite pen lifts.
Adjustable pen holder diameter. An ideal pen holder should be able to hold a big fat marker or a teeny tiny marker.
Adjustable pen position. I’ve noticed that some pens are a lot narrower near the pen’s tip. Thus, some pens will need the pen tip to be closer or farther from the wall, depending upon it’s own characteristics.
Adjustable tilt to pen. Although markers can pretty much draw at any angle, other pens (such as ball point or gel ink) just won’t work when they’re nearly horizontal.
Incorporate a micro servo. Single line drawings are really awesome – but with the addition of a micro servo for pen lifts, the robot becomes infinitely more versatile.
“Depth” of pen holder. Just to choose a term, this would be the distance the pen holder sticks out from the wall. To strain the metaphor, the “shallower” the pen holder the less it can tilt or tip front/back or up/down. Conversely, the “deeper” the pen holder, the more it could tilt or tip as it moves.
Distance of center of gravity from wall. This is an interesting one. When I started building my robot, I thought the best thing to do was to have the wires leave the project box as close to the wall as possible – so that they would “encourage” the pen holder to hang closely to the wall. Then I realized that it was actually equally important to achieve a balance of the pen holder. With most of the considerations here, I can pretty much determine whether it is better to choose a configuration one way or the other. Unfortunately, with this issue, I can’t decide whether it is better to have the pen holder’s center of gravity close or far from the wall. Of course, not knowing won’t stop me from pontificating, eh?
First, let’s agree there’s no apparent benefit to having a pen holder designed so that it is “deep” and balanced such that the center of gravity is farther from the wall.
Second, the only apparent benefit I can think of to have a “shallow” pen holder is that it might reduce tipping/tilting somewhat.
Adjustable line attachment points. As the weight of the pen holder changes, so would it’s center of gravity. Thus, the attachment points should also change.
Adjustable weight. Weight is one of the more finicky variables. If the pen holder is too heavy, the motors will have a harder time, require more power, and be noisier. If the pen holder is too light, there may not be enough pressure against the drawing surface, the cords may not be held taut (and thus will not behave as the program expects them to), it won’t be as responsive to the tugging of the two cords, and will tend to tip up or down or bind against the wall.
Balanced pen holder. An ideal pen holder should be balanced so that it doesn’t want to tilt left/right, up/down, or forward/back.
In this video from Darcy Whyte’s site you can see how a pen holder that appears to not be balanced well tends to tilt or tip in response to a change in direction – essentially pivoting around the pen’s tip. When this happens the pen either doesn’t move as much as the program expects causing certain features to be too short or the lines and curves drawn will appear to have a “stuttering” quality caused by the pen not moving with the cord because the pen tip is binding against the wall and then releasing suddenly and going too far.
I used to think it would be more advantageous to have slightly more weight on the forward side of the pen holder – now I’m not so sure. What I used to think was that by having the front end of the pen holder heavier, it would somehow exert more force on the wall. However, there really isn’t any logical reason this should be the case. Or, until I put a force sensor on the wall and test it, I don’t think I can claim this to be the case. Watching videos of drawing robots and my own drawing robot in action, I now think that a very light touch on the wall might be more ideal. Let’s assume any decent pen, especially markers, aren’t going to require a lot of force to leave a mark. The more force with which the pen is pressed against the wall, the more likely the pen tip is to bind against the wall and draw stuttering lines or lines that are too-short. Meanwhile, a very well balanced pen holder that is lightly pressing against the paper should not bind at all, resulting in more accurate lines.
Points of contact. There are any number of different designs for pen holders. Some of them only touch the drawing surface with the pen tip (like the Der Kritzler, AS220 Labs and GarabatoBot), while others tend to have three points of contact (such as Makeangelo 1 & 2), and some basically have a large wide flat surface which meets the drawing surface (Polargraph, Mr. Drew, and DRBO). My original mis-use of John Abella’s pen holder design actually had two points of contact – the pen tip and then the sack of batteries that hung from the holder. A few comments about these different styles:
One point of contact. This single point of contact will always be either the pen tip or device used to create a pen lift. Either way, the resulting pen holder can easily tilt left/right, back/forward, up/down, or any combination no matter how well balanced. If you’re going with a single point of contact design anyhow, I suspect a well balanced and “deep” pen holder might work best. Here, by deep, I mean a pen holder that sticks out from the wall. My suspicion is that dialing in the pen’s balance, you might be able to achieve a favorable angle of pen-to-paper. Having a “deeper” pen holder would allow more room for the robot operator to adjust the cord attachment points.
Two points of contact. This is just a bad idea – just don’t do it. The way I implemented this involved a weight hanging below the pen tip. When the pen moved too fast, the weight would swing causing a pendulum like wobble in the drawing.
Three points of contact. This seems, intuitively and by observation of Dan Royer’s videos, to be a stable pen holder design choice. The two extra points of contact (in the case of Dan’s Makelangelo below and to either side of the pen tip) prevent the pen holder from tilting back/forth, left/right, or even up/down. A three point of contact pen holder could still have a sway left/right problem, but that’s so bad if it means you’re eliminating all that tilting.
Full contact. This setup, like the three point contact, eliminates any form of tipping and is possibly less susceptible to left/right swaying. Unlike the single point of contact setup, I think this kind of pen holder might benefit from being shorter (as in doesn’t stick that far out from the wall)
…can be drawn by something as ugly as this
Cord attachment points. There appear to be about several different ways of approaching cord attachment to the pen holder.
The cord convergence point is exactly at the pen tip. This kind of setup requires nice big bearings or metal tubes that allow the cord attachment points to rotate around the pen tip. As the angle where the two cords meet changes, the two cord attachment points rotate to accommodate. Getting the cord convergence point to be centered on the pen tip is much more complicated to design and expensive to build. Look to the Polargraph and Ragnar drawing machine for examples of this type of design. This is particular design choice does not introduce any distortion.
Off-center but close together. This is a very simple and extremely common method of cord attachment. Each cord is connected to the pen holder a little to the left and a little to the right of center with the pen usually a little below that. As long as the two cord convergence points aren’t really far apart, this method will introduce very little distortion. Additionally, by having the two cord attachment points separate, this kind of pen holder enjoys a little extra stability.
Single cord convergence point, not at the pen tip. I have not been able to find any pen holders that use this method of cord attachment. It would basically involve using a single point of cord attachment, either by simply tying the two cords to the same point or by using two pivoting arms as with the Polargraph or Ragnar drawing machine. Rather than the pen tip being at the same point as the cord convergence, the pen tip would be at some point a constant distance and position from the cord convergence point. I think the reasons this type of holder isn’t seen is that it is so easy to build an “off-center but close together” style pen holder, any distortion with the “close together” method is extremely small, and having the cord attachment points separate provides the added benefit of a little extra stability against tilting. However, as long as stabilizers (three point of contact or full contact) are used, there shouldn’t be any reason not to employ a single cord convergence point.
Devil-may-care. The big Deathstar at the top of the post was drawn by the ridiculously crude pen holder pictured above. Even with the cord attachment points being 120mm apart, the results are really great.2 Building a pen holder with this design choice will introduce some distortion. It’s unlikely someone is going to be as foolish as I was to build a pen holder with cord attachment points as wide as 120mm. However, even in such an extreme case, the distortion was shockingly small.
Location of weights. While I haven’t done any tests on this, I’m fairly certain that having the weight of the pen holder as tightly packed around the cord attachment point as possible is most advantageous. The last thing you want is for an off-center weight to cause the pen holder to sway during a direction change.
Enough talk! I think it’s time I start actually designing a pen holder!
Default Series Title
This is a term I only learned today from the context of Sandy’s comment in an earlier post. This term is just so perfect and useful in describing drawing robot set-ups, I just have to include it here. [↩]
Unfortunately, the Sharpie started to run out of ink about 2/3 through the picture, which does detract from the drawing somewhat. [↩]
In discussing Sandy Noble’s Polargraph pen holder I mentioned how his design is optimized so that the point where the two cords meet is always the same as where the pen tip meets the paper.1 In the comments, he explained his rational, “So the pen tip is always at the tip of the hanging triangle, and there’s no distortion that way.” My response was that “…if the pen holder has a single ‘hanging triangle’ point in it with the pen tip a constant distance from that ‘hanging triangle point,’ the drawings should appear identical to those created at the ‘hanging triangle point’ – just offset by the constant distance.”
Without as much fancy-schmancy maths and geometry, I figured I would explain the thought experiment I used to conclude that a pen tip that is always a constant distance and position from the “hanging triangle point” will always produce an accurate distortion-free drawing. To help illustrate these thought experiments, I’ve enlisted the help of Yoda. “Hi Yoda!”
Fig 1: Yoda, being drawn by a drawing robot
In the picture above, Yoda is being drawn by a drawing robot.
Fig 2: Yoda drawing, annotated
Above, I’ve labeled the important parts of the drawing. On the top left “Motor A,” on the top right “Motor B,” which are attached by cords to the pen holder indicated by the dark blue line. Here, I’ve shown Yoda as he would be drawn by a drawing robot, where the robot then draws two more points.
Let’s say, because we’re feeling whimsical today, we want to add a second pen to our pen holder. We’ll use a red pen and affix it below the blue pen in such a way that the red pen will always be directly below the blue pen by the same distance.
Fig 3: Another pen
For the moment let’s pretend the red pen is capped so it won’t leave a mark. Now we’ll try to predict the position of the red pen at different points along the original drawing.
Fig 4: Where’s the red pen?
It turns out this task is pretty easy. The red pen, at any given point during the Yoda drawing, will always be directly below the blue pen by the same exact distance between the two pens. Okay, now let’s draw Yoda again – this time with the red cap off.
Fig 5: Double vision
We get two Yodas! How awesome is that! The reason I mentioned calligraphy pens in the title of this post is because it shows another way to think about this process. When we write with a calligraphy pen we don’t have one end of the pen wildly distorted – in theory the two points on the calligraphy pen are always a constant distance from one another and moving together (as long as we don’t rotate the pen when we write). You could imagine instead of a blue and red pen above, we’ve put a single calligraphy pen that’s as wide as the black line representing the distance between the two pens above. The resulting drawing would look like a Yoda – that had been smudged downwards by the same distance.
Let’s now draw Yoda again, but capping the blue pen and still tracking where the blue pen would be.
Fig 6: Not using the blue pen
We should end up with a result very similar to Fig 4. It’s the same Yoda, only red and shifted down from the original blue Yoda by the distance between the two pens.
Let’s draw Yoda again – this time we’ve still got a pen holder which has the cord from Motor A meet Motor B at exactly one point. As Sandy points out, this is really easy to do when you aren’t worrying about making that exact point be the same precise point as the pen tip. Directly below point where the two cords meet on the pen holder, we’ll put the red pen. From a functional standpoint, this setup is identical scenario to Fig 6.
Fig 7: Drawing just one red Yoda
Now we have a red Yoda, shifted down on the paper by the distance between the point where the two cords meet and where the red pen touches the paper. It’s important to note that there’s no special magic to having the red pen directly below the point where the cords converge. This pen tip just needs to be a constant distance and position from the cord convergence point at any given time. While it might be more difficult to build a pen holder that holds the pen far off to one side, there’s no reason this wouldn’t work.
Fig 8: Yoda, now in green
The lessons I take from this thought experiment are:
As long as the pen is a constant distance and constant position from the point where the two cords meet, your drawing will not appear distorted – just shifted by the same constant distance and position.
When calibrating the robot, the operator would need to calibrate the pen holder position by the cords convergence point – not the pen point. This means that the preview in your software won’t match exactly the position of your drawing on the paper.
While not part of the thought experiment per se, I think we can all agree that the more weight that is not centered on the cord convergence point, the more likely the pen holder is to sway.
I’m willing to defer to Sandy’s experience that pen holders that do not have the cord convergence point the same as the pen tip are, “Easier to design, easier to build, and cheaper, far, far cheaper.”
Thanks Yoda!
P.S. Just in case you’re wondering – the reason that SVG of Yoda above is so large is because it includes the full TSP version of Yoda I’m getting ready to draw. :)
The pen holder for a drawing robot is one of the most deceptively simple aspects of the entire machine. Stripped down to the most basic elements, the pen holder is nothing more than a small device used to connect to both cords from each motor to the pen. However, there are a number of extremely important, and subtle, design considerations that are not immediately evident.
Since Hektor’s debut in 2002, and arguably as far back as SIGGRAPH in 1988, people have been working on vertical pen plotters. In that time
I guess I should start this post with a discussion of the different gondolas out there.
In no particular order they are:
Binder clip. One version of the AS220 DrawBot used a simple binder clip holding a pen as the gondola/pen holder. It doesn’t get a whole lot simpler than that. It appears from the video associated with this post that the pen is held on a somewhat rigid rail. Similarly, Dustyn Roberts’ SADBot also used a big huge clip as a pen holder/weight and James Provost’s InternBot used a few binder clips. However, the most hacked together system is easily Josh Myer’s Muralizer which consisted of a lump of Play-Doh enveloping the pen.
AS220 Labs Pen HolderSADBot Pen Holder
Muralizer Pen Holder – Powered by Play-Doh
Clip Stabilizer plus Binder Clip. The “production version” of the AS220 DrawBot included lasercut spool parts, motor mounts, and a “clip stabilizer.” The setup described in the assembly instructions appears to indicate that the pen can be held reasonably steady using this design. However, having spoken to Shawn Wallace about these designs, he advised that this is really a non-optimal setup that has a lot of wiggle to it.
AS220 Labs Clip Stabilizer Design
AS220 Labs Clip Stabilizer plus Binder Clip
Der Kritzler by Alex Weber. This “gondola” made use of several lasercut parts creating a long wooden “cage” which held the pen in place along with a servo activated pen lift. I can’t quite tell how the “pen lift” operates, whether it retracts the pen itself or whether it pushes something in front of the pen’s tip preventing the pen from leaving a mark. Either way, this drawing robot pen holder has a feature that I never really appreciated until now – the wooden cage is suspended by two wooden “wings” which keep the point of attachment to the toothed belt at it’s midpoint. I’ll discuss this feature more later.
Der Kritzler Pen Holder
My first gondola was one of my own design and it was a miserable failure. The central ring was too large to accommodate the marker pens I was using. Also, it wasn’t heavy enough to make the monofilament hang in a straight line.
Crappy Gondola
Sandy Noble’s Polargraph. Sandy has probably logged more hours with his drawing robots than just about anyone else. So, when he uses a particular setup for his pen holder, there’s got to be something to it. The interesting features of his gondola are that the weight is concentrated around the pen tube by use of several large bearings and, as with several other designs here, the cords to the pulleys are centered over the holder’s center of gravity. After I published this post, I found a printable Polargraph-style pen holder by Lanthan on Thingiverse.
Sandy Noble’s Polargraph Gondola
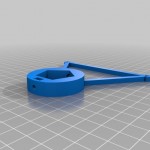
John Abela’s Gondola. I used John’s designs with my first drawbot, but without the blank CD. For the first time today I noticed that all of John’s pictures show the printed gondola glued to a blank CD for stability.1 When I used his design I just tied the top of the printed gondola to the monofilament line and added a ziplock baggie with dead batteries for weight. The result was a reasonably decent gondola that was pretty finicky. If the robot started drawing too close to one side or the other, the holder tended to twist and the pen made little to no contact with the paper. I can see why the blank CD was such a good idea.
John Abella’s Polargraph Gondola
Dealywhopper’s Dr. Scratchy Polargraph Gondola. Similar to John Abella’s Polargraph derivative is Dealywhopper’s Mr. Scratchy setup. It’s an amusing mixture of high tech 3D printed parts and hot glue hackery. There’s just something about its simplicity that really tickles me. Print the part, add some glue, slide the binder clip into the groove, glue the holder, some pennies for weight, and a micro servo to an old CD and you’re done. The interesting thing about this one is that the majority of the weight is off-center towards the drawing surface.
Dealywhopper’s Dr. Scratchy Polargraph Gondola
Dan Royer’s Makelangelo. In the spirit of open source Dan Royer has been working on and blogging about his Makeangelo and Makelangelo 2 robots. Dan’s Makeangelo is, like my first Polargraph derivative ‘bot, based on an Arduino Due and Adafruit Motor Shield. If you check out his Youtube channel, there’s about two dozen uploads documenting Dan’s experiments with different pen holder configurations. The version he’s shipping with his latest kit, which you can see below (the image is also a link to the video), uses three lasercut pieces to hold a pen and allow for an interesting pen lift. Although you can’t see it in the image below, there is a third lasercut piece which appears to slide forward and backwards with the micro servo. In the forward position it would push the pen holder top off the wall. The holder includes two rows of holes along the top for attaching the motor strings above the holder’s center of gravity.
Makeangelo 2 New Pen Holder
Drawing Machine by Ragnar. This drawing robot by Ragnar, a co-founder of Havtek, is exceptional for its incredibly high quality drawings and bespoke pen holder. Ragnar provides a detailed description of his setup in two posts. This may be the single most beautiful pen holder of the bunch. With heavy brass pieces, there appears to be no further need for any additional weights. As you’ll notice from his other photographs, the two brass arms are in the centered along the body of the pen holder. This pen holder looks like each of the parts came off of an assembly line just destined to be part of an awesome drawing robot.
Ragnar’s Drawing Machine Pen Holder
GarabatoBot (aka DoodleBot) by Made by Miguel Ángel de Frutos. This is one of the most interesting drawing robot pen holders ever made – if for no other reason than it integrates almost all of the critical components into the pen holder itself. As I recall, several other projects had tried to use integrated motors but found that the resulting pen holder/robot combination was too heavy to lift itself. Miguel’s design is well documented on his site and the printable parts are shared on Thingiverse.
GarabatoBOT robot by Miguel Ángel de Frutos
Harvey Moon’s Drawing Machine. What makes Harvey Moon’s drawing robot pen holder particularly interesting is his choice to have the pen actually move up and down. The pen holder incorporates a second non-drawing point and a rack-and-pinion system to advance and retract the pen. I have to admit, I really like the aesthetic quality of having a no-foolin’ pen lift.
There are two pieces of threaded rod on either side of the pen holder. By stacking pieces of acrylic you can adjust the position where the wire connects to the gondola.
There is a pen clamp using a rubber band, as indicated above. The best part about this clamp is that he uses varying pieces just below the pen to adjust the tilt on the pen, in case it requires a slight angle to draw on a more vertical surface.
There is a third piece of threaded rod at the bottom of the gondola where additional weights can be attached.
The clear acrylic and strategically placed holes in the top of the pen clamp allow the operator to see where the pen contacts the paper.
Darcy Whyte’s Mr. Drew Pen Holder
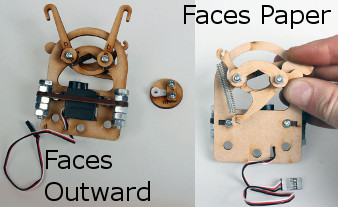
Stuart Childs DRBO. Stuart Childs sells a lasercut Polargraph-compatible robot kit. Once assembled it is a stand-alone drawing robot. The most interesting difference between Stuart’s robot and Sandy’s setup is the construction of the pen holder. I’ve included a picture of the front and back of the pen holder below to give you an idea of what it looks like. Per Stuart’s comment below, his own gondola was inspired by Darcy’s Mr. Drew.3 For a better idea of how it is assembled and how it operates, you should definitely check out Stuart’s excellent step-by-step assembly photographs. This pen holder has a small circular lasercut piece which attaches to the business end of a micro servo, to push ahead of the pen’s tip – allowing for “pen lifts.” There are two features in particular that I really like.
First, I like how the “arms” which connect to the motor cords can swivel. This is a very clever way around several potential problems. When tying the two cords to points on the pen holder, there are issues with placing them too far or to close together. Too far apart makes the pen holder extra stable, but the image drawn are distorted. Too close together minimizes distortion, but the pen holder can start to swing like a pendulum, causing wibbly wobbly lines. Additionally, if the cords from the motors have too much “twist” in them, the entire pen holder can actually be turned sideways and will stop drawing entirely. (I suspect just about any Polargraph-style pen holder which uses a large wide flat surface would be sufficient to combat the cord twisting/torquing problem.) Looking back to the AS220 Labs pen holder, you can see that it appears to use two rigid rails instead of string. The arms in Stuart’s robot essentially allow the cords from the motors to act as if they’re very close together – but probably wouldn’t allow much in the way of pendulum action.
Second, I appreciate his spring-loaded pen holder. This feature would allow his robot to accommodate a variety of pens or drawing implements. While a rubber band would obviously work as a quick hack, a true metal string would stand up to repeated use.
Stuart Childs’ DRBO Pen Holder
DrawBot Quick Change Pen Holder by UechiMike. Thingiverse user UechiMike designed his own pen holder which he identified as a derivative of Dan Royer’s Makeangelo. You’ll notice that UechiMike’s pen holder, like the DRBO immediately above, uses a rubber band in place of a spring as a way to accommodate a variety of pen sizes. UechiMike’s pen holder has holes on either side for routing the monofilament wire which, it looks like, are tied around. I have to wonder if the holder has any problem with torquing. You’ve got to love the recycling of dead AA batteries here. The only “gripe” with the design is that there isn’t any room for a micro servo to for pen lifts.
DrawBot Quick Change Pen Holder by UechiMike
Screwless Sharpie Holding Gondola by Bluemetal. Simple and sweet, this design doesn’t seem to have any weights or moving parts. Just a bit of printed plastic and a push-fit hole designed for Sharpies.
Screwless Sharpie Holding Gondola by Bluemetal
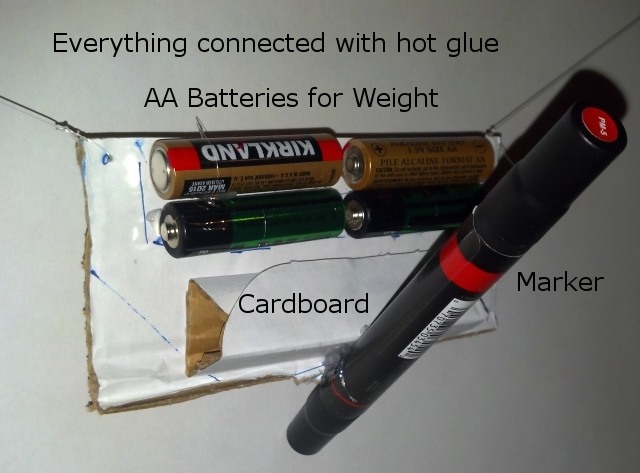
MakerBlock’s Cardboard Gondola. Okay, now the most intricate, well designed, and durable feat of engineering ever to meet a marker. My very own cardboard gondola. As you can see, I slapped four AA batteries and a pen to a jagged piece of cardboard. While it worked for several drawings4 it’s clearly nonoptimal. The cord attachment points are wide enough to cause distortion and not well balanced enough to prevent swinging. The only reason I slapped this together was that I was anxious to put my drawing robot to work.
MakerBlock’s Cardboard Gondola, Annotated
Frankly, my crappy gondola is a testament to the how forgiving DrawBot setups are. Even though I’ve been admiring drawing robot setups for probably a year and a half now, I’ve really only started to understand some of the design decisions. I’ll go ahead and publish this post5 and get to work on the next one laying out what I’ve learned from the different pen holders featured above.
If you’re just tuning in, I’m building an Arduino powered drawing robot. If you’re the least bit interested in making one of your own1 then please take thisquick DrawBot poll to let me know what you’re interested in. You can come right back and check out all the nifty little details in my drawing robot project, promise.
Okay! I’ve finished designing, printing, and installing all the plastic parts necessary and wired up all the bits that need to be wired. Despite the big curl of rainbow colored ribbon cable, which I left in because I didn’t want to measure the cable for an exact fit and because it just looks pretty, the wiring is extremely simple. Each of the stepper motors I’m using has four leads which, through some connections and cables, make their way to the PolargraphSD case. Once these eight wires are connected and the robot supplied with power, you’re ready to start drawing.
Wiring detail
To help tame the wiring mess I lightly braided2 the motor leads and added a drop of hot glue to keep them in line. I made sure I left more than enough slack so I can remove the motors and move them around. On the left side of the above photo you can see a curved piece of plastic. I’m using an old version of one of the monofilament spools to somewhat contain the rainbow ribbon cable.
Wiring and connectors
As mentioned above, the wiring is exceedingly simple – four wires from two motor are connected to eight terminals on the circuit board. Insisting on the rainbow ribbon cable as I did simultaneously complicated and simplified this project. The simplest possible solution would have been to wire the right side motor directly into the terminal blocks on the circuit board, solder four wires to the four left motor leads and plug these newly extended wires into the circuit board and call it a day. It would have involved only four soldered jointed and it would have been a breeze.
But, I had a dream. A dream of a sweet looking awesome drawing robot. And this dream involved soldering 16 separate connections and 8 additional wire ends.
On the left and the right I soldered the motor leads to a 4-pin break away 0.1″ header. Since I didn’t have any brown heat shrink tubing, I decided to color code the motor leads by covering the green lead with a little green heat shrink, the brown with blue heat shrink, the red lead with red heat shrink, and the yellow with yellow heat shrink. If you’re following along at home, alwaysremember to put the heat shrink on the wire before you solder the connection. Once I had soldered the four wires to the 4-pin connector and shrunk the heat shrink, I added a really wide piece of black heat shrink which I shrunk around the whole thing. This way I can easily grab all four wires at the same time. I also think it looks nice.
Before doing this soldering I made sure that I knew the exact order I needed to wire the motors to the circuit board. In case you’re using the exact same setup as me, the colors are, from left to right: yellow, red, brown, green. If I had wired the motors directly into the PolargraphSD board, you would see them, again left to right, as: yellow, red, brown, green, yellow, red, brown, green.
I then took the 4-pin female-to-female connector cable I bought from SparkFun and cut it right down the middle. I took my 10-wire rainbow ribbon cable and pulled away the two least colorful wires leaving brown, red, orange, yellow, green, blue, purple, and light gray. The I soldered the cut ends of one of the 4-pin female connectors to the brown, red, orange, and yellow ends of the rainbow ribbon cable and the other 4-pin connector to the green, blue, purple, and light gray side of the cable.
I spent more than a little time debating exactly how I would include these connectors. Should I solder the motor leads to the female connector wires or is it better to solder the leads to male pins? In the end I decided that if I ever took this project apart I might one day need to change the order of the wires coming out of the motor. If they were soldered to female headers, my only solution would be to add more connectors in between or cut the female connectors off. Since I soldered a 4-pin break-away block to the motor leads, I could theoretically break the four pins apart at a later date with little effort.
I suppose I could have chosen to be slightly less paranoid/OCD about checking and re-checking the wire order when I was soldering. There’s no actual harm in accidentally swapping the order of one of those connections – I could always just swap the appropriate wires going to the terminal block on the circuit board and no harm done. However, it was important to me, for purely aesthetic reason, that the ribbon cable actually look rainbow-y when it was connected to the terminal block.
Besides using one drop of hot glue with each of the motor lead braid bundles, I also added an additional drop underneath the green-through-gray section of the ribbon cable to help keep it in line.
Finished, Mounted Robot!
This is what the robot looks like installed on my wall! I’ve plugged it in and powered it up, but drawing will have to wait for another night. It’s a little difficult to see, but there are four additional plastic parts installed in this picture which were not included in the first picture above. To simply installation and removal, I’ve bolted two white dovetail slides to the wall. Then two black plastic mounts slide onto the remaining dovetail slide on the top of the project box and onto the white dovetail slides on the wall. Tighten a few M3x16 bolts, and everything is solidly in place! ((Just so you know, that the black cord running down the right side of the picture doesn’t really look like that. When I stood back far enough from the wall where the robot is installed, something was in the way which I didn’t want in the picture. When I smudged it out of the way I had to smudge-out the end of the power cord.))
The paper roll seems to unroll pleasantly from behind the project box with just enough resistance so there’s no way it will just unfurl unexpectedly. While it was a little difficult to get started behind the box, ideally I won’t have to repeat the process very often. While I was mounting the project box on the wall I realized that the wall bows out slightly. I don’t think this will affect anything much – it’s just an odd quirk of my home which I noticed for the first time.
I’m very much looking forward to starting a drawing tomorrow. I’ve got several in mind which I’ve prepared in anticipation of Maker Faire. :) While I’ve taken the necessary steps to fine tune the steppers by adjusting the potentiometers, I’m sure they will both need to be dialed in. Even once I’ve gotten a successful drawing done, I foresee additional room for improvement in this project. The pen holder/gondola is a constant source of innovation. I’m looking forward to trying out several designs. I’ll need to install the servo motor so I can do drawings with pen-lifts. Lastly, I think Sandy is hard at work developing the code to support endstops. I think this would be a really helpful addition as it will allow for automatically calibrating scripts to run just before a drawing. Edit: I almost forgot! I also need to experiment with different kinds of pens to find out which ones work best on nearly vertical surfaces.
Don’t forget to take a minute and fill out my DrawBot poll so I’ll know what to blog about next!
Default Series Title
I’ve heard of someone making one for as little as $30 [↩]
Which makes me think “lightly breaded,” which reminds me that I’m hungry, which in turn reminds me that I’m on a diet… Haha! [↩]
My original drawing robot was built using an Arduino Uno, Adafruit motor shield, and two beefy stepper motors bolted onto a big chunk of plywood.1 Now I’m in the process of building a new robot using a sweet wooden project box, a freeduino, a PolagraphSD shield, and the steppers from the original drawing robot. The other day it occurred to me that if I only had another set of steppers, I would have everything I need for a second drawbot.
About a week and a half ago I placed an order with SparkFun for some awesome rainbow colored ribbon cable, wire connectors, and some other stuff. Since I was buying some stuff anyhow, I figured $14 wasn’t much to pay to have another set of motors I could use to rebuild my old drawing robot.2 I also see several additional side benefits to having this extra set of motors. First, and most obvious, I’ll have two drawing robots.345 Second,67 I’ll have another set of motors I can put into some other wacky project down the road. Third, I’ll be able to test a totally different software setup on the second drawing robot without having to disassemble the other robot. Ideally I’d tinker a little with the source for Dan Royer’s Makelangelo’s software and Sandy Nobel’s Polargraph software.
Don’t forget to take a minute and fill out my DrawBot poll so I’ll know what to blog about next!
While I understand options like acoustic wool makes a very good sound/vibration insulator, I’d rather not have something that messy in my ‘bot. I’d be happy to use a material that doesn’t insulate as well, as long as it is clean.
I found this short strip of gray/black foam padding lying around my house among my daughter’s things. She had no recollection where she acquired it and believed she might have another piece somewhere. My MakerBot Cupcake CNC came with a large amount of this kind of padding – but it was pink. I didn’t have any of the pink stuff left over, otherwise I would have used it in place of the cardboard as the insulating material for my DrawBot’s stepper motors.
So – do you know the name of this foam padding? Do you know where I could pick up a few square inches of it to use as a sound/vibration insulator for my DrawBot’s stepper motors?
This is going to be another long in-depth post about my Arduino powered drawing robot. If you’d like to know more about how to build one yourself, please help me out by filling out my DrawBot poll. And, if after reading this post you find you want to know even more, be sure and check out the 68 preceding posts about the exact same topic, all listed in order at the end.
While I’m quite happy with how everything has turned out, I haven’t had a chance to fire up the robot and actually try a drawing. Once a few parts arrive from Sparkfun, I’ll be ready to give it a whirl. Until then, please forgive me for not sharing these designs yet. It’s less out of a desire for perfection1 and more out of desire not to strand some poor soul with some flawed printed parts. Thus, I beg your indulgence a little longer. Until then, I’d like to show you how all the bits I have so far work together.2
Filament guide and bolt covers
On the bottom left of the above picture you can see the filament guide – with filament helpfully sticking out of it. Just to the right of that you can see two bolt covers/endcaps.
The filament guides ((One on the left, one on the right side)) serve several important purposes. First, the monofilament line does not squeak when running through the smooth plastic filament guide as it does through a hole drilled in a piece of wood. Second, it ensures that the two ends of the filament are always at a constant, precise distance from one another which is important for accurate and repeatable drawings. Filament that is just spooling on and off can change position on the spool by a comparatively large amount.3 Third, the filament guides allow me to make sure the filament is flowing out of the box very closely to the back/bottom of the box – to help keep the pen holder/gondola against the wall. Fourth, they just look nice.
The bolt endcaps serve some practical and aesthetic purposes. Without these endcaps, the M3 bolts on the inside of the project box would protrude outside of the box beyond where they meet the 3mm nuts. The protruding bolts can scratch or puncture and also make the overall project look a little raw. One minor benefit to using these caps is that the force exerted by the bolt and nut as they are tightened against each other is spread out across the area underneath the endcap, leaving less marks on the project box.
For a project that could be easily disassembled, it would be interesting to create a variation on these plastic endcaps that essentially turned them into wingnuts. As you will note from the upcoming pictures, many of these parts were specifically designed to make modular assembly/disassembly/modification a breeze. Having had to pull these parts apart and reassemble them for these photos, I can assure you that taking everything to pieces and putting them back together is a cinch.
Exposed filament guide and stepper motor rail
In the photo above you will see the filament guide once I’ve pulled it out of the hole in the project box. I believe all I did was drill a 1/4″ hole, design the part to fit, press-fit the guide in place, and run the monofilament line through the guide. I had to re-print these since the first pair was just a little too short. Ideally the guides should just barely stick out from the project box, so that the monofilament never has to come in contact with the wood.
Once I get the ‘bot up and running, I plan to try using some endstops for automatic homing and printing. I’ve seen several drawing robot designs that use metal contacts or simple switches to help the ‘bot automatically home before printing. I think I prefer the style where metal contacts would go around the filament guides at either end, as they are less obtrusive on the exterior of the project box.
Just to the right of the tiny filament guide, you’ll see the plastic rail that I’m using to mount the stepper motors. There are holes in that long plank of plastic with recesses for the M3 boltheads. This rail or track or slide is held in place quite firmly by just those two bolts. Once the rail is in place, the motor mount can be slid back and forth. It’s a tight fit and would probably stay in place by itself, but why leave things to chance? The motor mount includes a bolt and captive nut behind the motor, so that it can be tightened against the rail.
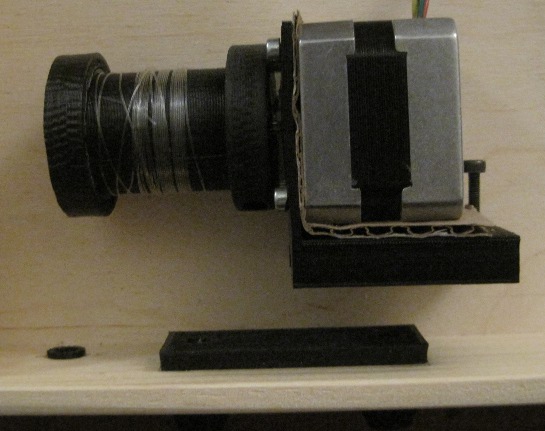
Stepper motor, fully installed
In the photo above you can see the stepper motor completely installed. It’s not much to look at, but I rather like it. You can just barely see the bolt just behind the motor that I use to keep the mount on the rail. The setup is pretty solid and more than enough for the amount minor operational stresses they will endure.
Stepper motor, bolt loosened and off rail
In the above photo you can clearly see the top of the filament guide sticking out of the project box, the motor mount removed from the rail, the loosened bolt I use to keep the mount tight against the rail, and the corrugated cardboard I’m trying out for sound insulation.
Stepper motor off rail and spool off motor shaft
In this view you can clearly see the bolt in the side of edge of the spool I use as a “set screw.” The end of the spool has to be as thick as it is in order to accommodate the captive M3 nut. While the other end of the spool does not have to be nearly as thick, I designed it to be symmetrical.4 You’ll also notice that the spool is not tapered on either end. I designed the spool to be a two-piece bolt-together design. This has the beneficial side effect of allowing me to trap the end of the monofilament line between the two pieces, rather than using a knot in the filament or some other such fix. ((OCD again))
End of spool
Above you can see the end of the spool. This is the part of the spool facing away from the motor. Since I didn’t want the spool to be too unbalanced5 I didn’t want to use just one bolt on one side of the motor shaft. I couldn’t use one bolt down the middle, since it would make the entire spool much longer than necessary. Given that I was trying to make wide-diameter spools anyhow, it was little hardship to add a way to bolt the spool together on each side. The end you see has two hexagonal holes to fit the M3 nuts and the other end has long holes going most of the way through, specifically designed to work with some of the M3x16 bolts I have lying around.
Paper roll mount
The paper roll mount system you see above were actually the first plastic parts I designed and installed into the project box.6 The entire assembly is pretty solid. You’ll notice I used another set of bolt endcaps to keep the bolt threads from sticking into the project box. While I didn’t anticipate them scratching or puncturing anything inside the box, I do really like the way they look.
Paper roll mount, disassembled
Above you can see the paper roll mount system disassembled.7 The bolt is simply loosened, allowing the piece of plastic which has a circular hole for the wooden dowel to slide back, in turn allowing the paper roll to be removed easily. You’ll note that the paper roll does not have any kind of cardboard core, as a roll of wrapping paper might. This is why I had to create the thin endcap for the paper roll. It serves to keep the paper roll centered on the dowel while preventing the paper from slipping from side to side. The plastic rail for the paper roll mount is the same exact rail, only slightly shorter, that I used for the motor mounts.
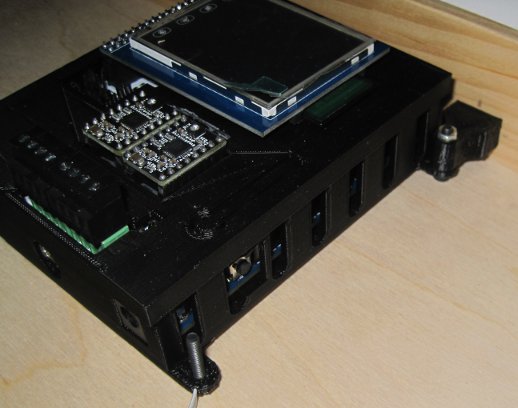
PolargraphSD case installed
When I designed the PolargraphSD case, I was mostly concerned about creating a case that didn’t use a lot of plastic and which could be easily mounted. What I didn’t take into account was how I would end up mounting it to the inside of this particular project box. In the end I had to design two plastic parts that would connect to the PolargraphSD case. The beneficial side effect is that now the entire case is set off from the back/bottom of the wooden project box by the thickness of an M3 bolt head on each of the four corners. It remains to be seen whether the vibration of the stepper motors would case the case to rattle.
Don’t forget to take a minute and fill out my DrawBot poll so I’ll know what to blog about next!
Default Series Title
Perfection is the mind killer. Perfection is the little-death that brings total obliteration. [↩]
First, if you haven’t taken the time to add your voice to my DrawBot poll, please take a moment to do so! ((Photo courtesy of Trashcam Project))
Since there seems to be interest in learning how to build a drawing robot as cheaply as possible, I figured I’d give some help on how to do it. As the old saying goes, “Fast, cheap and good – pick any two.” The hands-down easiest way to build a drawing robot is to buy some parts off the shelf, slap them together, and start rocking away. I’ll start with the cheapest possible way to get started and progress to the more off-the-shelf variety:
Basic Anatomy. Just about every single vertical wall drawing robot is made from the same basic materials. Fortunately, with a little effort these parts are pretty much interchangeable. You need circuit boards for the brain, two stepper motors to operate either side of the line going to the pen, a pen, and lots of wire. If you want to get fancy, you could also track down a servo motor. The rest could be just kludged together out of nearly anything. However, for the sake of completeness, here’s a shopping list or scavenger hunt list depending upon how you’re looking to build your robot:
Some form of electronic brain, either built from scratch or Arduino powered
Two identical stepper motors
Lots of wire
Spools
Strong thread or fishing line
A pen
Screws, bolts, wood, and/or printed plastic parts
Optional: one servo motor
Parts for free.
While the cheapest method, the time and effort investment won’t be insignificant. You’ll need to get your hands1 dirty. Some of the most expensive parts of a drawing robot could actually be obtained for $0 – as long as you’re willing to get your hands dirty. As long as you’ve got a hacksaw, a drill, and some screwdrivers the world is your oyster.
Stepper motors. Stepper motors (and possibly servo motors) can be found on neighborhood sidewalks, dumpsters, and in office building closets every single week. If you don’t know where to start, try just walking into an office building and offering to dispose of their old printers, copiers, scanners, and CD/DVD players. You’ll need to really dig into these machines to find stepper motors and when you find them, they’ll probably be the “permanent magnet” or “tin can” stepper motors. You can tell a stepper motor from a DC motor by looking at how many leads or terminals it has. Just two means it’s a DC motor. Four or five means it’s almost certainly a stepper motor. Ideally, you’ll want two identical stepper motors.
Wire. In a pinch you could use telephone, ethernet cables, old speakers, old USB cables, computer keyboards or mice, or even electrical cords cut off from any kind of electrical device as a source of wire. Basically, as long as you have a pair of wire cutters and wire strippers, you’ll never be without plenty of wire.
USB cable. No matter what kind of drawing robot you build, chances are you’ll need one of these. Most Arduinos use a USB A-to-B cable and some of the clones use a USB A-to-Micro or USB A-to-Mini cable. If you can only find a USB cable that’s of the wrong connector type, consider hacking them by cutting one end off and splicing the wires onto the necessary connector. Alternatively, and more destructively, you could cut and strip the wires in the cable, tear open the USB port on the Arduino/clone, and solder solder the wires from the USB cable directly to the board. Realistically it’s just easier to find or buy a cable that fits.
Power supply adapter. If your project includes a full-fledged Arduino or decent Arduino-clone, you can use a power supply providing 7-12V DC.2 If you look around your home3 you are almost certain to find a wide variety of power adapters for any number of different kinds of discarded electronics. Just look at the power adapter itself and it will explicitly state it’s voltage output. While you’re scrounging at an office building for copiers and printers, be sure to ask around for any old power adapters they may have.
Screws, washers, nuts, and bolts. Saving these parts as you take apart the various electronics will net you more hardware than you’ll need.
Wood. You can find scrap wood discarded at construction sites, in old pallets, or if you’re really hard up – inside furniture. You’ll want to rig something to attach two motors to a wall or a piece of wood (that would, in turn be mounted to a wall).
Spools. Nearly any kind of cylindrical object that has a hole in it that fits your motor shafts would work. You could use a left over thread spool or a bobbin. You could carve one from a cork. You could drill a hole into a curtain or closet rod and put rubber bands around the two ends to keep the thread or filament from sliding off.
Pen holder. The simplest example I’ve ever seen is from the AS220 drawing robot which featured a pen held by a binder clip, suspended by two pieces of monofilament wire. You could use another piece of carved cork, a lump of clay or a bunch of rubber bands around the pen to hold it to the wires. With a very lightweight pen holder, you may need to include a small weight. I used to use a plastic baggie containing several dead AAA batteries.
Building from scratch.
Back in 2011 Shawn Wallace wrote a great set of tutorials for Make about how to build a drawing robot. This setup doesn’t rely upon an Arduino, but rather building up stepper motor drivers and a control board from electronic components. Excluding the cost of wire, motors, a power supply, and shipping, the electrical components would probably cost about $15. The reason I excluded the wire, motors, and power supply is that these things could probably be obtained for free, as described above. Your total cost of building such a robot could as cheap as about $15 plus scavenged parts.
Arduino-based.
Building an Arduino based drawing robot is positively the easiest way to go. Your cheapest options are to get an Arduino-clone and some form of stepper motor shield(s).
Evil Mad Scientist Diavolino. While this Arduino clone can be bought as a solder-it-yourself-kit for only $13.50 plus shipping, it lacks the voltage regulator and USB port present on an Arduino Uno. This means you’ll need to be careful that your power supply choice only provides between 4.5 – 5.5V. Additionally, you’ll need an FTDI cable to communicate with the Diavolino. A new FTDI cable usually runs about $15-$20. Although I’ve never bought anything directly from EMSL, I own one of their Egg-Bots, I can say I’m quite happy with the quality of their products.
Dorkboard Kit. I don’t have any experience with either a “Dorkboard” or Surplusgizmos.com, but they’ve apparently this clone is selling for $6.25. As with the Diavolino, it lacks a voltage regulator and USB port. Unlike the Diavolino, it is not in an Arduino form-factor which means you’ll need a breadboard and mess of jumper wires or a really large mess of jumper wires.
Arduino. Going with a fully featured Arduino Uno, Arduino Mega or an electrically-identical clone means you get to use a USB cable interface, an off-the-shelf motor shield, and can use a large range of possible power adapters. Frankly, once you factor in the need for a FTDI cable, voltage regular or specialized power adapater, the need for a breadboard, and the work involved in MacGuyvering it all together, it might be easier and cheaper to just get a full featured Arduino.
Motor Shields
Arduino Motor Shield. The official Arduino motor shield will run you about $30. I haven’t used it, so I can’t really comment on it. Just know that it’s not the cheapest option and read on.
Two Sparkfun EasyDrivers. Dustyn Roberts’ SADBot used an Arduino with two Sparkfun EasyDrivers connected with wires and breadboards. With her great instructable, there’s no reason you couldn’t do the same. These drivers would run you about $15 each, plus shipping. Again, this is not the cheapest option.
Adafruit Motor Shield. I can’t recommend the Adafruit Motor Shield enough. It’s fairly easy to solder and at $19.50 it’s clearly the cheapest shield-based option. Adafruit’s website has detailed instructions on how to assemble and use the shield, with tons of Arduino libraries to get you started. Besides all that, there are two different well-documented open source drawing robot projects that make use of this same exact shield.
Kits.
As far as I know, there are only two currently available do-it-yourself kits out there for building a vertical line drawing robot.
Sandy Noble’s Polargraph and PolargraphSD. Sandy Noble has been publishing his Polargraph drawing robot designs and software since September of 2011. The software and firmware Sandy wrote his Polargraph can be used with an Arduino Uno and Adafruit Motor Shield or with his custom shield. The great thing about these kits is that with a small LCD screen and SD card port, they allow for completely computer-free drawing. For £30 you can get just the shield as an unassembled kit. For £78 you get the fully assembled PolarshieldSD including two stepstick drivers and an LCD touch screen. For £230 you get everything you need including the PolarshieldSD fully assembled with the stepstick drivers and LCD touch screen, in a 3D printed case, with 3D printed sprockets, stepper motors, a servo motor, motor mounts, and pen holder. You can find Sandy’s open source part designs on Thingiverse and all of his software and firmware on Google projects code repository.
Just as an FYI, my first drawing robot used an Arduino Uno, an Adafruit Motor Shield, and Sandy’s software and firmware. It worked wonderfully for me and I recently purchased a PolargraphSD shield from him so I can take my robotic drawings even farther.
Polargraph. As mentioned above, you can find Sandy’s open source part designs on Thingiverse and all of his software and firmware on Google projects code repository. What I particularly appreciate about using an Arduino with an Adafruit Motor Shield to power a drawing robot is that this setup is fairly software/firmware “agnostic.” Using these electronics as the brains behind the operation, you could choose to draw with either Sandy’s Polargraph firmware/software or Dan’s Makeangelo firmware/software and just about any kind of steppers, wire, spools, and hardware. So far I’ve only used Sandy’s Polargraph software, but once I finish building my brand-spanking-new PolargraphSD powered drawing robot, I think I’ll use my trust old Arduino and Adafruit Motor Shield to try out Dan’s software/firmware blend. And, once I’ve tried that I think I’ll take a crack at writing some Arduino drawing software of my own!
Der Kritzler by Alex Weber. Alex’s Der Krizler is one of the first drawing robots I had ever seen on the ‘net. He’s provided a fair bit of documentation for his setup, which uses a tiny Arduino clone and two Pololu motor drivers, and his code on Github.
Okay, that’s how you source or scavenge everything you need to build a drawing robot!
So, what would you like to know next? Take my DrawBot poll or leave a comment!