According to the USPS my Polargraph has landed at my local post office where I keep a post office box. ((Photo courtesy of Grant MacDonald)) Hopefully I can pick it up after work today!
I’ve been kicking around some design ideas for how my new DrawBot will look. I’d like it to be aesthetically pleasing and reasonably compact so that when not in use it will be reasonably unobtrusive. For the most part none of these designs would require the DrawBot to operate in a mechanically different way. However, most of them would probably look best with a fishing line spool rather than beaded cord and sprocket system.
Design and create a nifty DrawBot mounting system
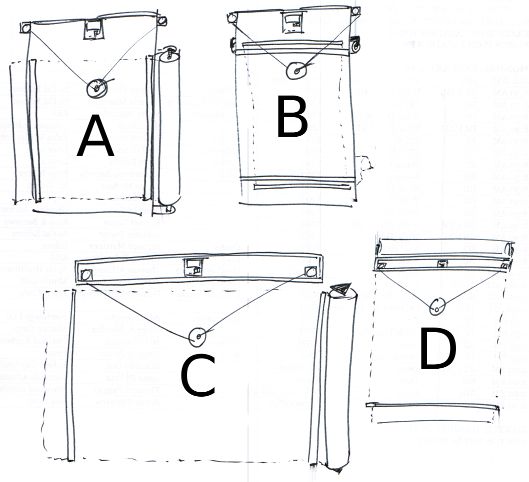
Above you can see some of my ideas for mounting a DrawBot to a wall. It is probably most ideal for a DrawBot to operate at a slight slope – so that a little bit of gravity is keeping the drawing gondola pressed against the drawing surface. That said, here’s my thought behind some of those designs.
Designs, Generally. Several of the designs above contemplate the drawing robot brain being housed inside a long thin box. I had tried housing my current DrawBot inside a box, but it just didn’t work very well. Since wiring would be easier if the motors are mounted near the robot brain and running the power cord to the robot would be easier if the brain were situated to one side, it might be most pleasing to use a wooden box that has a lid which can be flipped down over the front, rather than leaving the robot brain and motors exposed. One other interesting item is that while I’ve typically mounted the motors so that the motor shaft is pointed towards the wall with the spool on the outside, there’s no reason to design a clever mount which would orient the motor shaft perpendicular to the printing surface with the spool on the inside. This could result in keeping the fishing line a lot closer to the wall than would otherwise be possible.
Design A. This design features the motors, DrawBot brain, and roll of paper mounted directly to a piece of plywood essentially as my current set up exists. I figure I could pick up some cheap hardware store rulers and nail them to the board on the left and right side to keep the paper pressed against the DrawBot surface. While this is probably the easiest design to implement, it lacks the symmetry of the other designs.
Design B. This design features a similar motor and brain mount to Design A, except that the paper roll is mounted behind the board. This design also features a wide horizontal slot cut into the board near the top through which the paper roll could be fed. This would require the plywood board to be set off from the wall, which is not really that big a deal. One additional problem is that the best roll of paper I could find is actually a fair bit wider than the board itself. Of course, I could have someone chop down the roll of paper, but this seems like it would be a huge hassle.
Design C. This is wall-mounted system similar to something I first tried when I set up my DrawBot. I mounted the brain and the motors inside a long thin pine box I had lying around. I had tried a number of variations on this without much success.
Fishing line. I tried running the fishing line through holes in the bottom of the pine box, but the fishing line kept getting caught on the wood. I tried routing the fishing line through screw-in eyelets, but the fishing line would get caught on that too. In both instances the fishing line just wouldn’t run smoothly back and forth. If I tried this again, I would need to basically cut out the entire bottom of the box so that the fishing line would run off the motor and directly down onto the drawing surface. I think that unless I use bearings and pulleys, there’s no good way to route fishing line in a way that won’t be bothersome.
Robot Mounting. What I particularly like about this set up is that all the important bits are completely enclosed inside a box that could be mounted nearly anywhere. If the paper roll was not mounted to the wall and just a sheet of paper was used instead, the entire robot would become very portable.
Motor Mounting. Assuming the fishing line routing issue was just solved with bearings and pulleys, both motors could be set right very near to the robot brain in the center with a pulley on either end of the box. I’m not sure if it is is better to have all the weight in the center or somewhat distributed across the length of the box. That said, it would be a lot easier to deal with wiring if the parts were all close together.
Drawing Surface. This is the big problem with this design. Since the drawing surface is the wall and most walls have some sort of texture, it would cause a degree of randomness and unevenness to creep into the drawing itself. In some cases this might be desirable, interesting, or part of the effect – but I think I just prefer a drawing to be smooth unless I specifically cause it to be otherwise.
Paper Mounting. Assuming the robot was really installed on a wall, which does contradict somewhat with the desire to this design make the robot portable/modular, a paper roll could be mounted directly onto the wall, held in place by two hardware store rulers on either side. I suppose I could always put a big sheet of flat plastic behind the paper.
Design D. This wall-mounted system is very similar to Design C, except that the paper roll is mounted to the box housing the robot and the paper runs behind the box.
Aesthetics. I really like this design overall because it would be very compact, more “portable/modular” than Design C while still providing all of the functionality of Design C. Interestingly, it might actually be a lot better to mount the robot brain far to one side or the other. By doing so the AC adapter cord would not have to travel nearly as far to get to the brain.
Mounting Considerations. One big difference is that while Design C could be mounted with all of the mounting hardware hidden by the box itself, Design D might require all of the mounting hardware to be very far to either side of the box or outside the box entirely. This design would also only require one hardware store ruler to be placed on the wall, below the robot, since the top part of the paper would be kept flush against the wall by the robot box itself. This, of course, assumes that the robot would be mounted to the wall – but not so close that it would keep the paper from unrolling behind the box.
One more DrawBot design
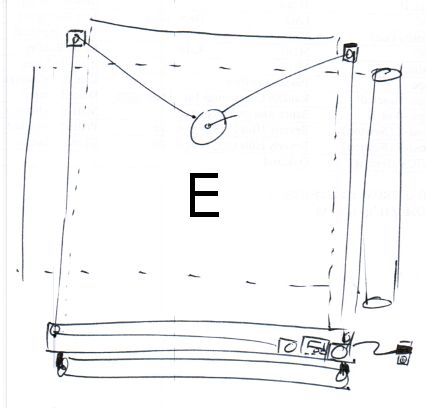
Design E. As I was typing this up another idea occurred to me.
One of the problems I had with a box-mounted system was that getting power or a USB cable into the box was difficult. For any interesting sized drawing the box would have to be mounted several feet off the ground. The benefit of this design is that the paper roll could be mounted below the wooden box1 and the wooden box could be mounted near the floor – with easy access to an electrical outlet. The downside is that the brain is basically on the floor where it can get kicked and that you’re going to have route the fishing line up over the drawing and around pulleys on either side.
One thing about this particular design is that I’ve drawn the DrawBot brain and both motors off to one side of the box as suggested in the “Designs, Generally” section above.
Having gone through the trouble of sketching and articulating the various benefits to each system, I think my favorite so far is Design D, with a lid over the front of the box, and the brain and motors mounted off to one side to make routing power to the project a lot easier.
Default Series Title
Or, like some of the designs above, it could be mounted to the wall off to the side. [↩]
The 3D printed plastic case I have for my current DrawBot doesn’t fit very well2 and doesn’t look awesome as it is literally duct taped to the plywood. An awesome new brain upgrade deserves a sweet new plastic case. I might customize Sandy’s design by adding some dual-extruded black/white hotness to it.
Putty, sand, prime, and paint my big chunk of plywood so it is presentable
Though, really, since I would just paint the wood white anyhow, I’ll most likely just prime the wood twice and call it a day.
Reconsider beaded cord versus fishing line
I’ve been using fishing line for my DrawBot, but many others including Sandy use beaded cord.
Fishing line. Fishing line is great when you enjoy the process of drawing as much as the drawing itself. From more than a foot or two away the pen holder looks like it is just floating in space. It is also cheap and pretty easy to manage with just a spool attached to the stepper motor. The biggest downside is that since it is wound around a spool a full turn of the spool when it is full of fishing line will let out more line than when there is little fishing line left on the spool. Every time fishing line is pulled in, it adds very slightly to the diameter of the spool and will skew the drawing. There are a few ways to compensate for this. You could enter the diameter of just the spool, spool full of fishing line, or spool half-full of fishing line. Each different usage will basically skew the drawing slightly differently. Another, more complex, alternative is to try to compensate for the extra diameter caused by the fishing line by fiddling with the code itself to consider a different spool diameter depending upon how much fishing line has been reeled in or out. Since this is way beyond my current Arduino programming capabilities, I’m just leaving it here as food for thought.
Beaded cord. Beaded cord is also fairly cheap, and certainly way cheaper than using a toothed belt. Since a beaded cord with matching sprocket does not accumulate on the sprocket, you have to figure out some way to manage the beaded cord – even if it just to let it hang off the side of the robot. With a kid and a cat, long loose lengths of cord might be problematic. Now that my daughter is older, this is less of a consideration. Lastly, the beaded cord will allow you to consistently draw images without having to worry about the spool-fishing line-variable diameter problem.
As I’ve been thinking about exhibit a drawing robot at the upcoming Bay Area Maker Faire in May
Design, print, and attach a mount for a large roll of paper
Ideally, when I’m done with a print job I can pull the paper across the print surface, tear off the finished drawing, and have a fresh new piece of paper ready to go without having to spend a lot of time re-aligning and re-mounting paper.
While it would be super cool to have the roll of paper motorized, I have no delusions that I’m going to do this.
Design, print, and use a new gondola, complete with servo powered pen-lift
Although I have the servo ready to connect to my existing DrawBot, I never did this. My favorite looking drawing robot drawing techniques were all TSP single line art or single-line-shading, so there was never a need for a pen lift or servo. I basically never invested the time to improve my gondola to do much more than create reliable drawings. As it is the gondola is weighed down by a piece of wire poked through a ziplock baggie with half a dozen old batteries inside. I like this solution because it is essentially re-using old batteries as small modular weights of consistent mass. But, there are so many better ways to use old batteries as weights without it being ugly. Plus, with a servo enabled gondola, I’ll be able to explore the world of vector drawings. I should probably just create a Polargraph style gondola and call it a day, since Sandy has logged more hours with a drawing robot than anyone else I’ve heard of.
Route wires in a pleasing manner
As you might have figured out by now, my current DrawBot set up is hacky and ugly. I’d like to have my DrawBot set up so that it looks nice and not a tangle of wires leaning against the wall.
Sandy is responsible for having put together the best instructions for building a Polargraph/drawbot anywhere on the web. Sandy’s latest kit uses an Arduino Mega clone, a shield specifically designed by Sandy to provide all the Polargraph functions, two StepStick motor drivers, an SD card slot, socket for an XBee wireless module, connections for endstop and servo support, and – best of all – an LCD touch screen interface.
While my own DrawBot was built entirely from off-the-shelf parts, I’d like to make it really polished. At the moment my DrawBot does not look like much. It is two motors bolted to a chunk of plywood with some circuit boards in a plastic holder which is duct taped to the chunk of plywood. It works and is as reliable as the PC operating it, but it is far from pretty. Stay tuned for some new design ideas!
My RSS feed for Slashdot brought my attention to an article on Slate. The Slashdot summary stated:
This Slate article talks about a single line of code — 10 PRINT CHR$ (205.5 + RND (1)); : GOTO 10 — and how it manages to create a complicated maze without the use of a loop, variables and without very complicated syntax.
Even though that “one line” of code really is two lines and it really does use a loop, that short string of code is still very interesting. While the way the code generates a maze isn’t immediately intuitive, it becomes obvious once you watch a bit of the video above. All that code does is randomly kick out a forward slash or backward slash. Once they wrap around to the next line, they start to form what looks like a maze.
As a little exercise I created something similar using PHP. To make that work I had to use a fair bit of CSS to make it look decent. In any case, it occurred to me that this would be a wonderful project for a Polargraph! Draw a random forward slash or backslash, get to the end of the line and make a bunch more on the return line. How awesome would a huge paper roll of nothing but a giant maze look?
I think I may have found a project cool enough to show off at Maker Faire. :)
Ellison: Why do it on a wall? Why not a drawing robot that draws on a large piece of paper on the ground? I think you’ll get better results from that.
I think there are a lot of good reasons reasons – some aesthetic, some technical, some practical – for having a DrawBot that draws on walls (or other vertical surfaces).
Aesthetically, I really like having a DrawBot that draws on vertical surfaces. When placed in the room or an adjoining room, I can watch it scritch-scratching away at an enormous drawing. In much the same way a snail’s meandering trail can be captivating, a DrawBot working out a TSP single-line-art drawing turns an apparently meaningless series of turns into a mass of scrawls that resolve into a work of art as soon as you take a step back. 2
Technically, the DrawBot is an exceedingly simple device. You could build it out of little more than Arduino, a motorshield, two motors, string, a pen, and whatever you might have lying around. Much of these pieces you could probably even scavenge for or salvage from other things. In fact, only the Arduino and motorshield are things you wouldn’t be able to dumpster dive for. The device works by moving the two motors in concert, such that by varying the length of string reeled in or out by a given motor is used to move the pen in an XY plane. The one “ingredient” not listed in the preceding sentences is, of course, gravity. If the point where the two strings meet at the pen did not hang essentially straight down, pulled constantly by gravity, the pen could go just about anywhere. If you were to place a normally vertical standing DrawBot flat on the ground, the pen would no longer be pulled away from the two motors – and would just flop onto the drawing surface. Now, you could add two more motors and more string and build a gondola that holds the pen vertically on a flat DrawBot surface while writing a lot more code… However, I am doubtful you would get any more precision out of such a setup. And, if you really require precision – an XY plotter might be more to your liking. An XY plotter build would require lots of hardware (belts and metal rods or metal extrusions), more tools, and be big and heavy, and limited in the size of its drawing capabilities. It would also be capable of really amazing speeds. That’s a lot of extra materials, work, custom coding, and loss of drawing capacity for a dubious trade off in
As a matter of practicality, the simplicity of design and materials means this is an extremely cheap project. An Arduino is only going to set you back about $30 and clones are as cheap as $15. I picked up two of Adafruit’s motor shields on sale for $12 each, but they’re normally $20. Screws and/or bolts, beaded cord or wire or fishing line, a big piece of wood or mounting things directly to a wall, 3D printed spools or just leftover spools from thread, a 3D printed gondola or a lasercut gondola or even a big red binder clip.3 Seriously, if you’ve got about $35 and some free time, you’re basically half way to building an awesome fun robot that can make arbitrarily large drawings. If you’re willing to buy all the materials, it probably won’t cost you more than $150.
I’ll say it again – a Polargraph DrawBot is a quick, cheap, easy, entertaining, and useful robotics project – especially for beginners. Outside of my 3D printers, this was easily the most rewarding DIY project I’ve ever attempted. The results are astoundingly disproportionately awesome to the amount of time, energy, skill, and money used to achieve them.
And, I wonder – if you could map all snails in the world at the same time, could they be working in concert on an enormous message? Perhaps something along the lines of “So long, and thanks for all the fish”? [↩]
I just love that Polargraph video by Sandy Noble. To see binder clip in action, skip ahead to 0:27. [↩]
Whose open source work I use for my own DrawBot [↩]
The next time he’s in stock, you better pull the trigger – he runs out of stock SUPER fast [↩]
It’s been a while since I’ve talked about my DrawBot. In large part that’s because it’s been a while since I’ve even used my DrawBot.
After a little dry spell of making, I’ve been rocking the DrawBot. Previously I had been drawing things about the size of a sheet of paper. While this meant the drawings were relatively quick, it also meant I could just print whatever I wanted directly onto a 8.5″x11″ sheet of paper using my traditional black and white laser printer. This weekend I’ve cranked out a few drawings – but on a much grander scale. Several months ago I picked up a large roll of white paper at the local office supply store – and I’ve since created about three 3-foot tall drawings. One is a House Stark direwolf from Game of Thrones, one is an R2D2 commissioned by my daughter, and a third is an R2D2 and C3PO also at the request for my daughter.1
The last one is particularly cool. I’ll take a picture for you later. There’s a lot of room for improvement with the gondola. The current setup is… let’s say… non-optimal. I’m working on an improved version.
Where was I? Oh yes! The watched pot!
I’m using Sandy Noble’s seriously awesome Polargraphsoftware to power my DrawBot. I’m rocking version 0.182 and noticed that when I’ve got the program on the “Input” tab it draws about 42 points a minute and when it’s on the “Queue” tab it draws about 96 points a minute when working on SVG / vector graphic. The cool part about drawing with the “Input” tab open is that you can see the drawing in progress. So, when I’m watching the drawing, it runs slower.
Dan Royer just posted his slides and notes from a recent talk at his local hackerspace. What I particularly like about these slides is that they simply and clearly lay out the math required to operate a DrawBot as well as some potentially practical implications and applications for a well designed DrawBot system.
Thanks to Dan Royer, I’ve added two new links to my really huge list of DrawBots. That brings the total to 28 drawing robots! 1 That’s a really incredible number of people who have shared documentation for their hard work. Six months ago I wouldn’t have guessed there were more than a dozen such projects on the ‘net. Clearly, the six-month-younger version of me is a fool. Thank god I know better, eh?
So, Dan appears to be using an Arduino + Adafruit motor shield, much like I’m using, but he’s running custom Gcode software with a Java GUI. It looks like Dan was wrestling with the problem of how to maximize drawing speed without causing his ‘bot to hang over the serial connection. If he gets some decent speed out of his setup, I’m definitely going to give that a shot.
Unfortunately, I haven’t done much in the way of robotic drawings lately. After experimenting with TSP drawings and finding out they would take an excruciatingly long time I set my drawbot aside for a little while. Fortunately, Sandy’s been on the case and has worked out a new firmware version that might prove to be twice as fast as the one I’m currently using.
Default Series Title
<queue thunder and lightning> 28! 28 drawing robots! Ah-ha-ha-ha-ha! [↩]